Je dán bod o hmotnosti na drsné rovině skloněné pod úhlem . Rychlost a poloha bodu na počátku děje
jsou nulové. Bod je uveden do pohybu vlivem vlastní tíže. Koeficient tření mezi bodem a rovinou je .
Určit:
Určete zrychlení, rychlost a polohu bodu v závislosti na čase, rychlost bodu v závislosti na dráze a rychlost bodu po překonání vzdálenosti .
Rešení:
Obr.2 Uvolnění hmotného bodu
Na obrázku je zachyceno uvolnění bodu v obecné poloze. K sestavení pohybové rovnice užijeme Newtonova způsobu.
Ve vektorovém vyjádření platí :
Složkové rovnice psané ve směru osy a jsou :
(1)
,
(2)
kde je třecí síla, tíhová síla.
Z rovnice (2)
vyjádříme normálovou sílu a dosadíme do (1).
Rovnici (1) vydělíme hmotností a přepíšeme do tvaru :
,
(3)
Dostali jsme hlavní pohybovou rovnici (3) . Je to lineární diferenciální rovnice 2.řádu s nenulovou pravou stranou.
Zrychlení bodu je závislé na parametrech a . To jsou ale z hlediska zadání konstanty. Tedy i výsledné
zrychlení je konstantní a označíme jej .
Rychlost bodu v závislosti na čase ; :
Vzhledem k jednoduchosti rovnice (3) lze k řešení použít separaci proměnných a poté integrovat.
Jako spodní meze intervalu nám poslouží příslušné počáteční podmínky. V tomto případě . Do horních mezí použijeme obecné hodnoty
rychlosti a času .
Po integraci :
(4)
Rychlost na čase závisí lineárně.
Poloha v závislosti na čase ; :
Užijeme obdobného postupu jako při řešení rychlosti. Počáteční podmínka v dolních mezích integrálů je .
Po integraci :
(5)
Poloha je tedy z hlediska času funkce kvadratická.
Rychlost bodu v závislosti na poloze ; :
K výpočtu lze například využít vztahu :
Počáteční podmínka užitá ve spodních mezích integrálů je .
(6)
Hodnota rychlosti v okamžiku dosažení dráhy je
(7)
Stejného výsledku lze při určování závislosti dosáhnout tak , že z rovnice (5) vyjádříme čas v závislosti na dráze :
a dosadíme do (4) :
(8)
Grafické průběhy vypočtených závislostí jsou na obr. 3 až obr. 6.
Zrychlení bodu
Obr.3 Zrychlení bodu a = a(t)
Rychlost bodu
Obr.4
Poloha bodu
Obr.5 Poloha bodu x = x(t)
Rychlost bodu
Obr.6 Rychlost bodu v = v(x)
Hmotný bod na drsné nakloněné rovině v odporujícím prostředí
Obr. 1
Dáno: , , , ,
,
Je dán bod o hmotnosti m na drsné rovině skloněné pod úhlem . Rychlost a poloha
bodu na počátku děje jsou nulové. Bod je uveden do pohybu vlivem vlastní tíže. Uvažujte odpor prostředí lineárně
závislý na rychlosti s koeficientem úměrnosti
.
Určit: , ,
Určete průběh zrychlení, rychlosti a polohy bodu v závislosti na času.
Řešení:
Obr. 2
Hmotný bod v obecné poloze uvolníme (viz. Obr. 2) a k vyjádření setrvačných účinků použijeme D`Alembertův způsob. Ve vektorovém vyjádření platí:
Složkové rovnice psané ve směru os a jsou:
(1)
(2)
kde je třecí síla:
odporová síla prostředí:
tíhová síla:
D`Alembertova doplňková dynamická síla:
Z rovnice (2) ještě vyjádříme sílu normálovou a dosadíme do (1):
(2)
(2)
Rovnici (1) vydělíme hmotností a přepíšeme do následujícího tvaru:
(3)
Hlavní pohybová rovnice (3)
je tedy lineární, 2. řádu, s konstantními koeficienty a nenulovou pravou stranou.
Jejím řešením je závislost
1) Homogení řešení rovnice (3)
Rovnici (3)
přepíšeme do homogeního tvaru:
Charakteristický polynom je:
jehož kořeny jsou:
Homogení řešení napíšeme ve tvaru:
2) Partikulární řešení
Pravá strana rovnice (3) je konstanta, tedy polynom nultého skupně. Partikulární řešení odhadneme ve tvaru polynomu 1. stupně. Provedeme
potřebné derivace a dosadíme do (3)
.
Po dosazení:
Partikulární řešení tedy je:
3) Obecné řešení
Obecné řešení je součtem řešení homogeního a partikulárního:
(4)
4) Nalezení integračních konstant a
Tyto konstanty určíme z počátečních podmínek uvažovaného děje. Ty jsou:
a) poloha v nulovém čase je taktéž nulová
b) rychlost v nulovém čase je nulová: .
Pro uplatnění počáteční podmínky b) potřebujeme rovnici popisují rychlost bodu. Zderivujeme tedy (4)
podle času a dostaneme rovnici (5)
(5)
a dosadíme:
a)
b)
a)
b)
Z rovnice b) plyne:
a z rovnice a) plyne:
Integrační konstanty dosadíme do (4):
tedy:
Popis rychlosti bodu získáme z rovnice (5):
Zrychlení jako derivace rychlosti je:
TF-KS-01 - Vystřelení HB pružinou na drsné nakloněné rovině
obr. 1
Dáno:
-
-
tuhost pružiny
-
stlačení pružiny
-
úhel nakloněné roviny
-
koeficient smykového tření
Určit:
-
Rychlost vystřelení
-
vzdálenost , kdy se bod zastaví.
Předpoklad: Zanedbání hmotnosti pružiny.
Řešení:
Rozdělíme na dvě fáze.
První fáze - vystřelování hmotného bodu v intervalu
obr. 2
(1)
(2)
(3)
(4)
Po dosazení z do a z a do dostáváme vlastní pohybovou rovnici.
Označíme-li
pak
zrychlení je funkcí
Pro výpočet rychlosti použijeme vztah
resp.
Rychlost při vystřelení pak
Rychlost bodu při opuštění pružiny je
(5)
Druhá fáze - pohyb hmotného bodu po opuštění pružiny v intervalu
Je dán bod o hmotnosti na ploše válcového tvaru,jejíž poloměr křivosti je .
Bod se začne pohybovat z daných počátečních podmínek polohy a rychlosti bezodporově.
Určit :
Zjistěte úhel ,při kterém dojde k odpoutání hmotného bodu od válcové plochy. Určete průběh normálné síly od počátku pohybu do okamžiku
odpoutání v závislosti na úhlu . Tedy , .
Obr.2 Uvolnění hmotného bodu
Řešení :
Uvolníme hmotný bod v obecné poloze a sestavíme pohybové rovnice Newtonovým způsobem v souřadném systému tečna , normála.
(1)
(2)
kde je tečné zrychlení bodu, je normálné zrychlení bodu, je normálová síla, je tíhová síla.
Po dosazení získáváme :
(1)
(2)
Máme-li v prvním případě řešit odtrh hmotného bodu od plochy , tedy velikost úhlu , je v tomto okamžiku styk mezi bodem a podložkou
přerušen , tedy normálová síla je nulová a rovnice (2) přejde v (4). Integrací v mezích daných počátečními podmínkami můžeme z (1) určit průběh úhlové
rychlosti.
;
(3)
Vztah (3) dosadíme do (4) , kde je zkrácena hmotnost a úhel nabývá mezní hodnoty .
(4)
(5)
odtud jednoduše vyjádříme
(6)
a tedy úhel odpoutání je
(7)
Při určování průběhu normálné síly použijeme rovnici (2) , do níž dosadíme (3).
Roznásobením závorky a rutinní úpravou dostaneme
(8)
Diskuze počátečních podmínek :
1) Budou-li počáteční podmínky nulové ,
Obr. 3
tzn. a , bude bod spočívat na nejvyšším místě válcové plochy v nestabilním
rovnovážném stavu ( obr.3 ). Jakýkoli malý impuls ho uvede do pohybu. Předpokládejme tedy počáteční podmínky ,
sice nenulové ale blížící se nule. Potom vztahy (7) a (8) přejdou v (9) a (10).
(9)
(10)
Je zřejmé , že za předpokladu nekonečně malých počátečních podmínek úhel odpoutání nezávisí na žádných parametrech ,
tzn. na hmotnosti bodu , poloměru válcové plochy , dokonce ani na hodnotě tíhového zrychlení. A tak kdybychom byli schopni za uvedené podmínky
experiment provést , dopadl by stejně na Zemi jako třeba na Měsíci. Bod by se odpoutal vždy pod stejným úhlem , jehož kosinus je roven .
2) Další zajímavou úvahu můžeme učinit ,
Obr. 4
položíme-li počáteční rychlost bodu a úhel mějme libovolný z intervalu .
Potom tedy i a po dosazení do (6) dostáváme , že kosinus úhlu odpoutání je vždy roven kosinu úhlu počátečního
. Opět bez ohledu na parametry .
(11)
Graficky je tento vztah vyjádřen pro poloměr válcové plochy na obr.4 .
3) Nyní položme hmotný bod do libovolné počáteční polohy
. Při nulové počáteční rychlosti se bod na ploše udrží nejdéle. Pokud
bude bod se od plochy odpoutá dříve. V mezním případě , bude-li rychlost dostatečně veliká , dojde k odpoutání již v počátečním úhlu ,
viz (11). Dochází vlastně k šikmému vrhu ( obr.5 ).
(12)
Stanovme si tuto mezní kritickou rychlost . Vztah (12) dosadíme do (6).
a odtud plyne
(13)
za předpokladu , že v tomto případě bude počáteční poloha bodu na vrcholu plochy přechází vlastně situace ve vodorovný vrh
z výšky (viz obr. 6). Rychlost musí být větší nebo rovna .
pro
Obr. 4
Obr. 6
DYN-02-1: I.úloha dynamiky (kinetostatika) pro volný pohyb HB
Příklad 2.1: I.úloha dynamiky (kinetostatika) pro volný pohyb hmotného bodu.
Částice plovoucí na povrchu víru má trajektorii, která je ve válcových souřadnicích popsána parametrickými rovnicemi
kde , , a jsou dané konstanty.
Určete: složky , a síly , která tento pohyb vyvolává, je-li hmotnost částice .
Řešení:
Pohybová rovnice
má ve válcovém souřadnicovém systému složky
(1)
(2)
(3)
Z kinematiky víme, že
V daném případě je
Protože (podle zadání), můžeme také zapsat
Dosazení do (1), (2) a (3) nakonec dává
Radiální síla má záporné znaménko, takže působí směrem do středu víru. Je důsledkem hydrostatických sil v okolní kapalině. Transverzální složka je nulová. Je to ilustrace zákona zachování momentu hybnosti, který budeme probírat později. Axiální síla je tíhová síla částice.
TF-KS-02 - Vodorovný vrh hmotného bodu
10 kg náboj je vystřelen vodorovně s počáteční rychlostí z výšky . Určete dostřel náboje a dobu dopadu střely na zem. Zanedbejte odpor vzduchu.
Dáno:
Určit:
obr.1
Řešení:
1. Uvolnění
Počáteční podmínky:
V čase je a
obr.2
2. Pohybové rovnice
(1)
Ve složkách pro hmotu (střelu) platí
(2)
(3)
Z rovnic vyjádříme
(4)
(5)
Zrychlení a je rovno počáteční rychlosti
Pro určení vyjdeme ze vztahu
(6)
pak
(7)
Ze zrychlení vypočítáme pomocí vztahu
(8)
Po integraci a dosazení počáteční rychlosti dostáváme
Bod o hmotnosti se pohybuje po hladké válcové ploše s počáteční rychlostí Vyšetřete úhel, při kterém dojde k odpoutání bodu od válcové plochy a rychlost opoutání
Dva hmotné body jsou spojeny lanem vedeným přes kladku. Hmotnost lana i kladky zanedbáme, lano uvažujeme dokonale nepružné. Koeficient smykového tření mezi hmotou a nakloněnou rovinou je Určete sílu v laně a zrychlení
obr.1
Dáno :
Určit :
1. Uvolnění :
Hmotný bod
obr.2
Hmotný bod :
obr.3
2. Sestavení pohybových rovnic vychází z Newtonova zákona :
(1)
Pro náš případ přímočerého pohybu v rovině rovnice rozepíšeme do složek
(2)
(3)
Po dosazení pro bod platí
(4)
(5)
Připojíme vztah
(6)
pro bod vyjde
(7)
Body jsou spojeny lany a oba se pohybují se stejným zrychlením
(8)
Řešení :
Do rovnice (4) postupně dosadíme za a z rovnic (6) a (5)
(9)
Z rovnic (7) vyjádříme a dosadíme do (9)
(10)
Z rovnice (10) vyjádříme zrychlení
(11)
Dosadíme-li vztah (11) za do rovnice (7), múžeme vyjádřit
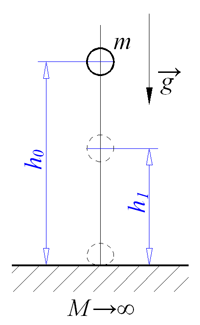
Dáno: Hmotný bod o hmotnosti je s nulovou
počáteční rychlostí spuštěn z výšky proti podložce,
která je v klidu a má hmotnost . Po
odrazu od podložky vystoupí hmotný bod do výšky ,
kde má opět nulovou rychlost.
Určete: Koeficient restituce pro
materiálovou dvojici hmotný bod/podložka.
Řešení: Ve výšce tíhového pole má hmotný bod
potenciální energii
a podle zadání nulovou energii kinetickou .
Při dopadu na podložku má naopak nulovou energii potenciální
a kinetickou
Podle zákona zachování mechanické energie tak platí
takže dopadová rychlost je
S touto rychlostí vstupuje hmotný bod do polopružného rázu s objektem
o hmotnosti a s nulovou rychlostí.
Newtonův předpoklad obecně formulovaný pro dva hmotné body s
nenulovými rychlostmi před i po rázu jako
(hvězdičkou označeny rychlosti po rázu) pro daný případ dává
(1)
Záporné znaménko určuje změnu smyslu pohybu, takže po rázu bod
stoupá. Druhým použitím zákona zachování mechanické energie nyní dostaneme
z toho
Po dosazení z (1)
takže nakonec
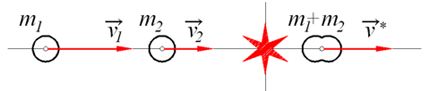
DYN-07-3: Ráz dokonale nepružný
Příklad 7.3 Ráz dokonale nepružný
Dva hmotné body s danými hmotnostmi a rychlostmi se dokonale nepružným
rázem změní v jeden hmotný bod se součtem hmotností a společnou
rychlostí.
Dáno:
hmotnosti ,
rychlosti , před rázem
Určit:
rychlost po rázu
rozdíl kinetických energií po a před rázem
Řešení: Pro daný případ platí zákon zachování hybnosti
Z toho
(1)
Kinetická energie soustavy před rázem je
(2)
a po rázu
(3)
Dosazením (1) do (3) dostaneme
Změna je pak
takže nakonec
Záporné znaménko indikuje ztrátu kinetické energie. Takto
ztracená kinetická energie se přeměnila na deformační energii
zúčastněných hmotných bodů.
Rotační pohyb tělesa v rovině
Zjištění momentu setrvačnosti ojnice k ose procházející těžištěm a polohy těžiště
Obr. 1 Zadání
Dáno :
Je dána ojnice s rozměrem a hmotností . Dvojím odkýváním ojnice kolem os a byly stanoveny
doby kmitu a .
Určit :
Určete vzdálenost těžiště od osy a moment setrvačnosti ojnice k ose procházející těžištěm.
Obr. 2 Uvolnění
Řešení :
Ojnici můžeme nahradit obecným tělesem , které uvolníme D'alembertovým způsobem. Předpokládejme kyv kolem osy .
Polohu tělesa měříme úhlovou souřadnicí .
Rovnice rovnováhy :
(1)
(2)
(3)
kde
doplňkové D'Alembertovy dynamické účinky jsou , ,
a tíhová síla je .
Pro nalezení veličin a nám postačí rovnice (3). Zbylé dvě by sloužily k výpočtu reakce v místě uložení .
Tedy
, ,
a po úpravě do standartního tvaru dostáváme diferenciální rovnici pohybu fyzikálního kyvadla.
(4)
Rovnice (4) je nelineární. Avšak za předpokladu , že ojnici rozkýveme tak , aby souřednice , můžeme napsat , že .
Potom dostáváme lineární diferenciální rovnici (5) , kde výraz u značí kvadrát vlastní frekvence kývání ojnice .
(5)
(6)
Poznamenejme , že jmenovatel výrazu v (6) , , je moment setrvačnosti kyvadla k ose procházející bodem .
Dále platí :
(7)
Porovnáním rovnic (6) a (7) vyjádříme moment setrvačnosti .
(8)
Nyní uskutečníme kyvy ojnice kolem os a a zjistíme periody kmitů a .
Obr. 3
Obdobou rovnice (8) pro případ měření a) na obr. 3 je rovnice (9) odpovídající provedení experimentu b) , kde vzdálenost těžiště od osy rotace
je .
(9)
Porovnáním pravých stran rovnice (8) a (9) , kde jedinou neznámou je poloha těžiště , dostáváme :
Obr. 4
Na závěr ještě uveďme alternativní způsob uvolnění tělesa , kdy tečnou a normálovou složku D'Alembertovy dynamické doplňkové
síly a umístíme do místa rotace .
Všechny rovnice odvozené pro původní případ zůstávají v platnosti. Pouze za D'Alembertův dynamický doplňkový moment dosadíme .
Fyzické kyvadlo
Dáno:; počáteční podmínky:
Hmotná homogenní obdélníková deska s kruhovým otvorem se kývá kolem vodorovné osy .
Obr. 1. Zadání
Určit:
Vyšetřete pohyb tělesa a určete dobu kmitu .
Řešení:
Těleso vychýlíme z rovnovážné polohy, ve směru rostoucí výchylky zvolíme kladný smysl úhlového zrychlení.
Obr. 2. Rozbor
Pohybová rovnice rotačního pohybu tělesa je
,
(1)
kde je vzdálenost těžiště od osy rotace .
Pro řešení je třeba určit polohu těžiště a hmotový moment setrvačnosti tělesa .
.
Moment setrvačnosti obdélníka k těžišti S1 je
.
Moment setrvačnosti kruhu k těžišti S2 je
.
Moment setrvačnosti útvarů k ose rotace vypočteme užitím Steinerovy věty
,
.
Hmotový moment setrvačnosti celého tělesa k ose rotace je
,
kde
,
,
,
,
,
.
Rovnice (1) je vlastní pohybová rovnice. Jde o nelineární diferenciální rovnici 2. řádu.
Zjednodušeně ji lze řešit za předpokladu malých výchylek kolem rovnovážné polohy,
kdy platí .
.
(2)
Rovnice (2) je lineární diferenciální rovnice 2. řádu a popisuje harmonické kmitání. Řešení předpokládáme
ve tvaru
,
(3)
kde
.
Konstanty A a B určíme z počátečních podmínek:
.
(4)
Dosazením počátečních podmínek v čase do rovnic (3), (4) dostáváme
,
.
Výsledky:
Doba kmitu:
Pro případ výchylek větších než 5° rovnici (1) řešíme numericky.
Rotující těleso má v naznačené poloze zadaný pohyb (obr.1). Je dána hustota rotujícího útvaru ,
zakótované rozměry , , , a úhlová rychlost a zrychlení rotačního pohybu a .
Určit: , ,
Určeme reakce v ložiskách způsobené setrvačnými účinky a potřebnou hnací dvojici. Pasivní odpory zanedbejme.
Obr. 1
Řešení:
Uvolnění:
Obr. 2
Jde o prostorový případ tělesa rotujícího kolem stálé osy. Setrvačné účinky nahradíme redukčním párem , v počátku zvoleného souřadného systému
, , . Dále zavedeme složky reakcí; v levém ložisku, které přenáší
také osovou sílu, to budou:
, , ,
v pravém , . Platí:
Odstředivou a tečnou složku D´Alembertovy síly vyjádříme jako:
Poloha těžiště (hmotného střediska) čtvrtkruhu a hmotnost čtvrtválce jsou:
Složky dynamického momentu jsou vyjádřeny:
Tím, že jsme k vyjádření dynamických účinků použili D´Alembertova principu, můžeme pro rotor psát soustavu šesti rovnic rovnováhy (sílu zanedbáme). První tři rovnice jsou složkové a další momentové.
Osový moment setrvačnosti a deviační momenty vypočteme:
Jestliže je tloušťka tělesa malá vůči poloměru , lze vliv tloušťky na velikost momentu
setrvačnosti zanedbat.
Velikosti reakcí jsou:
Tím jsme získali soustavu sedmnácti rovnic pro stejný počet neznámých: , , , , , , , , , , , , , , , , . Vyřešením této soustavy rovnic dostáváme obecný výsledek (bez ohledu na tvar rotujícího tělesa):
Hledané reakce v ložiskách a hnací moment vycházejí následovně:
Výsledky pro konkrétní zadané hodnoty:
,
,
,
,
,
,
,
,
,
,
Kinetická energie tělesa konajícího rotační pohyb kolem osy v prostoru
Obr. 1
Dáno: , těleso
Je dáno obecné těleso rotující kolem osy o úhlovou rychlostí .
Určit:
Určete kinetickou energii tělesa .
Řešení:
Obr. 2
Vektor úhlové rychlosti je dán:
,
a poloha elementu hmotnosti tělesa je:
.
Potom kinetická energie tělesa je:
,
kde resp. jsou příslušné osové resp. deviační momenty k daným osám.
Alternativně lze postupovat takto:
.
Dynamika rotujícího tělesa kolem stálé osy
Hmotný kruhový segment se otáčí kolem svislé osy, k níž je připevněn kloubem a lanem podle obr. Určete osovou sílu v laně, známe-li hmotu a míru . Otáčky jsou konstantní, hmotu lana a osy zanedbejte.
Hmotný homogenní rotační válec o poloměru a hmotě se valí po vodorovné rovině. Po proběhnutí dráhy se zastaví. Počáteční rychlost středu je .
Určit :
Určete rameno valivého odporu .
Obr.2 Uvolnění
Řešení :
Představme si válec ve vzdálenosti od výchozí polohy. Jeho pohyb rozložme na posuv bodu S (referenční
bod) a druhotnou rotaci kolem tohoto bodu.
Pohybové rovnice jsou :
rovnice rovnováhy ve svislém směru :
při valení platí kinematická závislost :
za předpolkladu splněné statické podmínky valení
Řešením prvních čtyř rovnic dostáváme :
pro válec pak ( )
Použitím vztahu
dostaneme výsledek
.
Ke splnění statické podmínky valení musí koeficient smykového tření mezi válcem a podložkou být
.
Dodejme pro zajímavost možnost určení ramene valivého odporu užitím věty o změně kinetické energie :
kde v integrálu na pravé straně je pouze práce momentu síly . Protože tečná reakce prochází
pólem pohybu , tedy bodem s nulovou rychlostí a proto tato síla nekoná práci.
Dosazením za
a
, vyjde pro již výše vypočtený výraz.
Kinetická energie tělesa konajícího obecný rovinný pohyb
Dáno: Je dáno těleso o rozměrech , a hmotnosti konající obecný rovinný pohyb v naznačené poloze. Rychlost referenčního bodu A je dána vektorem .
Určit: Určete kinetickou energii tělesa konajícího obecný rovinný pohyb.
Řešení: K řešení použijeme myšlenku základního rozkladu ORP tělesa na unášivý pohyb posuvný a relativní pohyb rotační. Rychlost unášivého pohybu je dána rychlostí referenčního bodu A. Relativní pohyb je rotační se středem rotace v bodě A a úhlovou rychlostí .
Kinetická energie tělesa je dána integrálem kinetických energií elementárních částí tělesa . Poloha elementu je vzhledem k bodu A určena polohovým vektorem .
kde je -ová souřadnice těžiště tělesa a moment setrvačnosti tělesa vzhledem k bodu A.
Souřadnice a rychlost bodu A:
potom
a odtud
Úlohu také můžeme vyřešit Königovou větou
kde je rychlost těžiště S a moment setrvačnosti vzhledem k těžišti. Všimněte si rozdílu ve výsledném vztahu výše, kdy referenční bod není totožný s těžištěm.
Dynamika současných pohybů
Hmotný bod na paralelogramu
Obr.1 Počáteční poloha paralelogramu
Dáno : , , , ,
Je dán paralelogram rotující s konstantní úhlovou rychlostí .
Na tělese paralelogramu je umístěn hmotný bod o hmotnosti . Délka ramen paralelogramu je . je tíhové zrychlení a koeficient drsnosti mezi hmotným
bodem a tělesem paralelogramu.
Určit: podmínky pohybu hmotného bodu
Určete podmínky pohybu hmotného bodu po tělese paralelogramu.
Obr.2 Uvolnění hmotného bodu
Řešení:
K řešení použijeme uvolňovací metodu v kombinaci s D'Alembertovým způsobem vyjádření setrvačných účinků.
Unášivý pohyb koná těleso paralelogramu. Je to pohyb posuvný. Relativní pohyb bodu po paralelogramu je taktéž posuvný.
Složkové rovnice ve směru os a :
(1,2)
kde
je třecí síla mezi hmotným bodem a tělesem paralelogramu,
je D'Alembertova doplňková síla relativního pohybu,
je D'Alembertova doplňková síla unášivého pohybu.
V tomto případě jde pouze o složku normálovou (odstředivou).
Složka tečná (na obr. 2 znázorněna čárkovaně)
je nulová , protože , tedy .
je tíhová síla působící na hmotný bod, je síla normálová.
1) Podmínka kontaktu mezi hmotným bodem a tělesem paralelogramu
Z rovnice (2) vyjádříme normálovou sílu .
Podmínka pro styk bodu a tělesa je nenulová normálová síla (v mezním případě může být i nulová). Je vidět, že síla nabývá minima tehdy, jestliže . Tzn., že úhel
je pro možnost ztráty kontaktu s podložkou kritickým místem. Podmínka nepřetržitého styku bodu a tělesa tedy je:
Odtud můžeme vyjádřit:
(3)
Parametry a jsou konstanty. Vztah (3) je omezující podmínka pro
velikost úhlové rychlosti, aby nedocházelo k nadskakování hmotného bodu.
Animace pohybu paralelogramu - nadskakování hmotného bodu
(alternativně zde)
2) Oblast relativního pohybu hmotného bodu
Předpokládejme ,že na počátku pohybu byla relativní rychlost bodu vzhledem k tělesu paralelogramu nulová .
Budeme zkoumat, za jakých podmínek nedojde k posunu bodu po tělese.
K pohybu nedojde tehdy, bude-li velikost setrvačných sil působících na bod menší než velikost síly třecí jenž pohybu brání (v mezním případě může nastat rovnost). Rovnici (1) přepíšeme do tvaru:
(4)
Absolutní hodnota na levé straně znamená, že abstrahujeme od směru relativního pohybu. Zajímá nás pouze informace, zda bod vzhledem k tělesu paralelogramu stojí nebo ne. Je-li relativní rychlost nulová, a nemá-li se
tento stav změnit, musí být relativní zrychlení a tím i D'Alembertova doplňková síla relativního pohybu . Proto rovnici (4) můžeme po dosazení za a užití (2)
přepsat do tvaru:
a odtud
(5)
Podmínka (5) říká, že pokud úhel nabývá takové hodnoty, že absolutní hodnota jeho sinu je menší (maximálně rovna) než pravá strana rovnice,
potom nedochází k relativnímu pohybu bodu po tělese paralelogramu. To je graficky vyjádřeno na obrázku. Bod se v oblasti
nebo symetricky
nepohybuje. Přesáhnou-li funkční hodnoty pravé strany (5) na celém intervalu
mezní čárkovanou křivku, která má s křivkou levé strany pouze dva
společné body, potom k pohybu bodu nedojde nikdy.
Obr. 3 Grafické znázornění podmínky (5)
Soustavy těles
DYN-13-2: Dynamika soustava těles, redukční metoda
Tříčlenná soustava je tvořena nepohyblivým rámem č.1 se souřadnicovým systémem , ozebným hřebenem č.2 se souřadnicovým systémem a ozubeným segmentem č.3 se souřadnicovým systémem ve tvaru válce. Těleso 3 je na základním rámu uloženo rotačně, těleso 2 je počátkem 2 souřadnicového systému vedeno po přímce a vazba mezi tělesy 2 a 3 je valivá v dotykovém bodě . V obrázcích je zakreslena výchozí poloha a běžná poloha . Těleso 2 je zatíženo danou silou a vlastní tíhou, těleso 3 jen vlastní tíhou.
Dáno:
rozměry , , , , ;
hmotnostní charakteristiky , , , ;
síla kde , jsou konstanty.
Určete pohyb dané soustavy redukcí na fiktivní hmotný bod v místě 2 tělesa 2.
Řešení:
Použijeme redukovanou pohybovou rovnici
(1)
kde polohovou souřadnicí soustavy bude
Redukovanou hmotnost vypočteme z rovnosti kinetické energie redukované a skutečné soustavy
(2)
Zde
a , se musí určit kinematickým řešením soustavy. Transformační rovnice pro těleso 2 a bod 3 je
(3)
Dosazení za vektory a transformační matici dává
takže
(4)
(5)
Eliminací vypočteme
(6)
a z rovnice (5)
(7)
Podmínku valení mezi tělesy 2 a 3 uplatníme jako rovnost odvalených oblouků
tedy
(8)
Ze (7) je
přičemž ze (6) je
Dosazením do (8) nakonec máme
(9)
Protože podle (6) je , je (9) zápisem zdvihové funkce .
Úhlovou rychlost určíme implicitní derivací vztahu (6) upraveného na tvar
tzn.
takže
(10)
Rychlost těžiště tělesa 2 určíme derivováním transformační rovnice
tzn.
Dosazením za vektory a transformační matici dostaneme
tedy
(11)
(12)
Z toho
(13)
Zbývá vypočítat . Z (9) dostaneme
takže s přihlédnutím k (10) je
(14)
Dosazením do (2) můžeme nyní určit redukovanou hmotnost
(15)
Redukovanou sílu určíme z rovnosti okamžitých výkonů působících sil
Vzhledem ke směrům působících sil , a je dále
(16)
Zde chybí výpočet . Transformační rovnice pro těleso 3 a bod je
takže
Dosazením máme
takže
(17)
Dosazením do (16) dostaneme
Pro dosazení do (1) zbývá určit
Derivaci určete z (15) sami. Nepřehlédněte, že , takže
Výsledná diferenciání rovnice je analyticky neřešitelná. Musí se použít numerické řešení.
Kmitání
DYN-14-1: Kmitání rotujícího tělesa
Příklad 14.1: Kmitání rotujícího tělesa.
Nehmotné rotačně uložené těleso nese hmotný bod. Jeho pohyb je určen soustavou pružin a tlumičem, připojenými podle obrázku.
Dáno:
hmotnost hmotného bodu;
délky , ramen;
volné délky , , a konstanty tuhosti , , pružin;
konstanta tlumiče .
Určete:
hlavní pohybovou rovnici;
vlastní frekvenci netlumených kmitů;
tlumicí frekvenci ;
poměrný útlum za předpokladu "malých" výchylek .
Řešení: začíná uvolněním tělesa.
Rovnice dynamické rovnováhy jsou
(1)
(2)
(3)
Specifikovat můžeme silové účinky
(4)
(5)
(6)
přičemž je konstanta tuhosti celé soustavy pružin. V soustavě jsou dvě pružiny paralelně; jejich ekvivalentní tuhost je
Pro sériové řazení a pak platí
takže
(7)
Kinematické rovnice jsou
(8)
(9)
(10)
(11)
Dosadíme-li nyní do (3), dostáváme
Pro malé výchylky je
takže
je finální tvar hlavní pohybové rovnice.
Úpravou
a srovnáním se standardním tvarem
dostáváme
Literatura
[1] Bradský, Z., Vrzala, R.: Mechanika III. Dynamika, skripta, TU Liberec, Liberec 1990
[2] Brdička, M., Hladík, A.: Teoretická mechanika, Academia - nakladatelství Československé akademie věd, Praha 1987
[3] Felber, V.: Technická mechanika - mechanika hmotného bodu s úvodem do vektorového počtu, Technicko-vědecké nakladatelství, Praha 1951
[4] Hörmann, J. a kolektív: Technická mechanika pre silnoprúdovú elektrotechniku, Alfa, vydavatelstvo technickej a ekonomickej literatúry, SNTL, Praha 1986

 na drsné rovině skloněné pod úhlem
na drsné rovině skloněné pod úhlem  . Rychlost a poloha bodu na počátku děje
jsou nulové. Bod je uveden do pohybu vlivem vlastní tíže. Koeficient tření mezi bodem a rovinou je
. Rychlost a poloha bodu na počátku děje
jsou nulové. Bod je uveden do pohybu vlivem vlastní tíže. Koeficient tření mezi bodem a rovinou je  .
.
 .
.


 a
a  jsou :
jsou :
 ,
,
 třecí síla,
třecí síla, tíhová síla.
tíhová síla.  a dosadíme do (1).
a dosadíme do (1).

 a přepíšeme do tvaru :
a přepíšeme do tvaru : ,
, 
 je závislé na parametrech
je závislé na parametrech  a
a  .
. :
:
 . Do horních mezí použijeme obecné hodnoty
rychlosti
. Do horních mezí použijeme obecné hodnoty
rychlosti  a času
a času  .
.


 :
: .
.

 :
:
 .
.

 je
je 
 dosáhnout tak , že z rovnice (5) vyjádříme čas v závislosti na dráze :
dosáhnout tak , že z rovnice (5) vyjádříme čas v závislosti na dráze :



 ,
,  ,
,  ,
,  ,
,
 ,
, 
 .
.
 ,
,  ,
, 


 a
a  jsou:
jsou:



















 a
a 

 .
.


















 , kdy se bod zastaví.
, kdy se bod zastaví. 





 do
do  a z
a z  do
do  dostáváme vlastní pohybovou rovnici.
dostáváme vlastní pohybovou rovnici.





 použijeme vztah
použijeme vztah

 pak
pak










 v závislosti na
v závislosti na 

 Pak
Pak

 dosadíme z rovnice
dosadíme z rovnice 

 .
Bod se začne pohybovat z daných počátečních podmínek polohy
.
Bod se začne pohybovat z daných počátečních podmínek polohy  a rychlosti
a rychlosti  bezodporově.
bezodporově.
 ,při kterém dojde k odpoutání hmotného bodu od válcové plochy. Určete průběh normálné síly od počátku pohybu do okamžiku
odpoutání v závislosti na úhlu
,při kterém dojde k odpoutání hmotného bodu od válcové plochy. Určete průběh normálné síly od počátku pohybu do okamžiku
odpoutání v závislosti na úhlu  . Tedy
. Tedy  ,
,  .
.


 je tečné zrychlení bodu,
je tečné zrychlení bodu, je normálné zrychlení bodu,
je normálné zrychlení bodu,

 ;
; 





 použijeme rovnici (2) , do níž dosadíme (3).
použijeme rovnici (2) , do níž dosadíme (3).

 a
a  , bude bod spočívat na nejvyšším místě válcové plochy v nestabilním
rovnovážném stavu ( obr.3 ). Jakýkoli malý impuls ho uvede do pohybu. Předpokládejme tedy počáteční podmínky
, bude bod spočívat na nejvyšším místě válcové plochy v nestabilním
rovnovážném stavu ( obr.3 ). Jakýkoli malý impuls ho uvede do pohybu. Předpokládejme tedy počáteční podmínky  ,
,  sice nenulové ale blížící se nule. Potom vztahy (7) a (8) přejdou v (9) a (10).
sice nenulové ale blížící se nule. Potom vztahy (7) a (8) přejdou v (9) a (10). (9)
(9)
 (10)
(10)
 .
.
 .
.
 a po dosazení do (6) dostáváme , že kosinus úhlu odpoutání
a po dosazení do (6) dostáváme , že kosinus úhlu odpoutání  .
. (11)
(11)
 na obr.4 .
na obr.4 . . Při nulové počáteční rychlosti
. Při nulové počáteční rychlosti  bod se od plochy odpoutá dříve. V mezním případě , bude-li rychlost
bod se od plochy odpoutá dříve. V mezním případě , bude-li rychlost 
 . Vztah (12) dosadíme do (6).
. Vztah (12) dosadíme do (6).

 přechází vlastně situace ve vodorovný vrh
z výšky
přechází vlastně situace ve vodorovný vrh
z výšky  pro
pro 
 ,
,  ,
,  a
a  ,
,  a
a  síly
síly  , která tento pohyb vyvolává, je-li hmotnost částice
, která tento pohyb vyvolává, je-li hmotnost částice 







 (podle zadání), můžeme také zapsat
(podle zadání), můžeme také zapsat


 z výšky
z výšky  . Určete dostřel
. Určete dostřel  střely na zem. Zanedbejte odpor vzduchu.
střely na zem. Zanedbejte odpor vzduchu.

 je
je  a
a 

 pro hmotu
pro hmotu 




 a je rovno počáteční rychlosti
a je rovno počáteční rychlosti 
 vyjdeme ze vztahu
vyjdeme ze vztahu

 vypočítáme pomocí vztahu
vypočítáme pomocí vztahu
 dostáváme
dostáváme


 pak z rovnice (11) vypočítáme
pak z rovnice (11) vypočítáme 





 rozepíšeme do skalárních rovnic ve dvou kolmých směrech
rozepíšeme do skalárních rovnic ve dvou kolmých směrech 


 a určíme rychlost HB
a určíme rychlost HB 

 je dána výrazem
je dána výrazem
 a
a


 dosadíme do vztahu pro normálové zrychlení
dosadíme do vztahu pro normálové zrychlení






 a
a



 Pak rovnice
Pak rovnice 














 dostáváme
dostáváme






 dosadíme
dosadíme






 jsou spojeny lanem vedeným přes kladku. Hmotnost lana i kladky zanedbáme, lano uvažujeme dokonale nepružné. Koeficient smykového tření mezi hmotou
jsou spojeny lanem vedeným přes kladku. Hmotnost lana i kladky zanedbáme, lano uvažujeme dokonale nepružné. Koeficient smykového tření mezi hmotou  a nakloněnou rovinou je
a nakloněnou rovinou je  Určete sílu v laně
Určete sílu v laně  a zrychlení
a zrychlení 


 :
:







 a
a  z rovnic (6) a (5)
z rovnic (6) a (5)




 do rovnice (7), múžeme vyjádřit
do rovnice (7), múžeme vyjádřit



 proti podložce,
která je v klidu a má hmotnost
proti podložce,
která je v klidu a má hmotnost  . Po
odrazu od podložky vystoupí hmotný bod do výšky
. Po
odrazu od podložky vystoupí hmotný bod do výšky  ,
kde má opět nulovou rychlost.
,
kde má opět nulovou rychlost.
 pro
materiálovou dvojici hmotný bod/podložka.
pro
materiálovou dvojici hmotný bod/podložka.

 .
.
 a kinetickou
a kinetickou


 a s nulovou rychlostí.
a s nulovou rychlostí.






 ,
, 
 před rázem
před rázem
 po rázu
po rázu
 po a před rázem
po a před rázem



 a
a  byly stanoveny
doby kmitu
byly stanoveny
doby kmitu  a
a  .
.



 ,
,  ,
, 
 nám postačí rovnice (3). Zbylé dvě by sloužily k výpočtu reakce v místě uložení
nám postačí rovnice (3). Zbylé dvě by sloužily k výpočtu reakce v místě uložení  .
Tedy
.
Tedy ,
,  ,
, 
 , můžeme napsat , že
, můžeme napsat , že  .
Potom dostáváme lineární diferenciální rovnici (5) , kde výraz u
.
Potom dostáváme lineární diferenciální rovnici (5) , kde výraz u  .
.

 , je moment setrvačnosti kyvadla k ose
, je moment setrvačnosti kyvadla k ose  procházející bodem
procházející bodem  .
.
 .
.
 .
.
 a
a  umístíme do místa rotace
umístíme do místa rotace  .
.
 ; počáteční podmínky:
; počáteční podmínky: 
 .
.


 ,
, je vzdálenost těžiště od osy rotace
je vzdálenost těžiště od osy rotace  .
.
 .
. .
. .
. ,
, .
. ,
, ,
, ,
, ,
, ,
, ,
, .
. .
.
 .
. ,
, .
. .
. do rovnic (3), (4) dostáváme
do rovnic (3), (4) dostáváme

 ,
,
 .
.
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 
 ,
,  v počátku zvoleného souřadného systému
v počátku zvoleného souřadného systému
 ,
,  ,
,  . Dále zavedeme složky reakcí; v levém ložisku, které přenáší
také osovou sílu, to budou:
. Dále zavedeme složky reakcí; v levém ložisku, které přenáší
také osovou sílu, to budou:
 ,
,  ,
,  ,
v pravém
,
v pravém  ,
,  . Platí:
. Platí: 

 a hmotnost čtvrtválce
a hmotnost čtvrtválce 

 zanedbáme). První tři rovnice jsou složkové a další momentové.
zanedbáme). První tři rovnice jsou složkové a další momentové.

 , lze vliv tloušťky na velikost momentu
setrvačnosti zanedbat.
, lze vliv tloušťky na velikost momentu
setrvačnosti zanedbat. 

 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 








 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,

 , těleso
, těleso
 ,
,
 je:
je:
 .
.





 ,
, resp.
resp.  jsou příslušné osové resp. deviační momenty k daným osám.
jsou příslušné osové resp. deviační momenty k daným osám.

 .
. a míru
a míru 






 ;
;




 .
.


 bude mít střed válce S potom, co urazí dráhu
bude mít střed válce S potom, co urazí dráhu  . Dále určete zrychlení
. Dále určete zrychlení  tohoto středu.
tohoto středu.
 v laně
v laně
 v bodě S
v bodě S
 a zrychlení středu válce
a zrychlení středu válce  ,
, .
. ,
, ,
, .
.
 .
. ,
, ,
, ,
, .
. ,
, .
.





 a hmotě
a hmotě  se zastaví. Počáteční rychlost středu je
se zastaví. Počáteční rychlost středu je  .
.




 )
)

 dostaneme výsledek
dostaneme výsledek  .
.
 .
.
 prochází
pólem pohybu
prochází
pólem pohybu  , tedy bodem s nulovou rychlostí a proto tato síla nekoná práci.
, tedy bodem s nulovou rychlostí a proto tato síla nekoná práci. a
a  , vyjde pro
, vyjde pro  již výše vypočtený výraz.
již výše vypočtený výraz. ,
,  .
.
 tělesa konajícího obecný rovinný pohyb.
tělesa konajícího obecný rovinný pohyb.
 . Poloha elementu
. Poloha elementu  .
.


 je
je  moment setrvačnosti tělesa vzhledem k bodu A.
moment setrvačnosti tělesa vzhledem k bodu A.


 je rychlost těžiště S a
je rychlost těžiště S a  moment setrvačnosti vzhledem k těžišti. Všimněte si rozdílu ve výsledném vztahu výše, kdy referenční bod není totožný s těžištěm.
moment setrvačnosti vzhledem k těžišti. Všimněte si rozdílu ve výsledném vztahu výše, kdy referenční bod není totožný s těžištěm.
 ,
,  .
Na tělese paralelogramu je umístěn hmotný bod o hmotnosti
.
Na tělese paralelogramu je umístěn hmotný bod o hmotnosti  .
. 

 je třecí síla mezi hmotným bodem a tělesem paralelogramu,
je třecí síla mezi hmotným bodem a tělesem paralelogramu, je D'Alembertova doplňková síla relativního pohybu,
je D'Alembertova doplňková síla relativního pohybu, je D'Alembertova doplňková síla unášivého pohybu.
je D'Alembertova doplňková síla unášivého pohybu. je nulová , protože
je nulová , protože  , tedy
, tedy  .
. je tíhová síla působící na hmotný bod,
je tíhová síla působící na hmotný bod, je síla normálová.
je síla normálová.
 . Tzn., že úhel
. Tzn., že úhel
 je pro možnost ztráty kontaktu s podložkou kritickým místem. Podmínka nepřetržitého styku bodu a tělesa tedy je:
je pro možnost ztráty kontaktu s podložkou kritickým místem. Podmínka nepřetržitého styku bodu a tělesa tedy je:

 .
Budeme zkoumat, za jakých podmínek nedojde k posunu bodu po tělese.
.
Budeme zkoumat, za jakých podmínek nedojde k posunu bodu po tělese.
 nulová, a nemá-li se
tento stav změnit, musí být relativní zrychlení
nulová, a nemá-li se
tento stav změnit, musí být relativní zrychlení  a tím i D'Alembertova doplňková síla relativního pohybu
a tím i D'Alembertova doplňková síla relativního pohybu  . Proto rovnici (4) můžeme po dosazení za
. Proto rovnici (4) můžeme po dosazení za  a užití (2)
přepsat do tvaru:
a užití (2)
přepsat do tvaru:

 nabývá takové hodnoty, že absolutní hodnota jeho sinu je menší (maximálně rovna) než pravá strana rovnice,
potom nedochází k relativnímu pohybu bodu po tělese paralelogramu. To je graficky vyjádřeno na obrázku. Bod se v oblasti
nabývá takové hodnoty, že absolutní hodnota jeho sinu je menší (maximálně rovna) než pravá strana rovnice,
potom nedochází k relativnímu pohybu bodu po tělese paralelogramu. To je graficky vyjádřeno na obrázku. Bod se v oblasti
 nebo symetricky
nebo symetricky
 nepohybuje. Přesáhnou-li funkční hodnoty pravé strany (5) na celém intervalu
nepohybuje. Přesáhnou-li funkční hodnoty pravé strany (5) na celém intervalu
 mezní čárkovanou křivku, která má s křivkou levé strany pouze dva
společné body, potom k pohybu bodu nedojde nikdy.
mezní čárkovanou křivku, která má s křivkou levé strany pouze dva
společné body, potom k pohybu bodu nedojde nikdy.
 , ozebným hřebenem č.2 se souřadnicovým systémem
, ozebným hřebenem č.2 se souřadnicovým systémem  a ozubeným segmentem č.3 se souřadnicovým systémem
a ozubeným segmentem č.3 se souřadnicovým systémem  ve tvaru válce. Těleso 3 je na základním rámu uloženo rotačně, těleso 2 je počátkem 2 souřadnicového systému vedeno po přímce
ve tvaru válce. Těleso 3 je na základním rámu uloženo rotačně, těleso 2 je počátkem 2 souřadnicového systému vedeno po přímce  a vazba mezi tělesy 2 a 3 je valivá v dotykovém bodě
a vazba mezi tělesy 2 a 3 je valivá v dotykovém bodě  . V obrázcích je zakreslena výchozí poloha
. V obrázcích je zakreslena výchozí poloha  . Těleso 2 je zatíženo danou silou
. Těleso 2 je zatíženo danou silou  ,
,  ;
;
 ,
,  ,
,  ;
;
 kde
kde  ,
,  jsou konstanty.
jsou konstanty.

 vypočteme z rovnosti kinetické energie redukované a skutečné soustavy
vypočteme z rovnosti kinetické energie redukované a skutečné soustavy

 ,
,  se musí určit kinematickým řešením soustavy. Transformační rovnice pro těleso 2 a bod 3 je
se musí určit kinematickým řešením soustavy. Transformační rovnice pro těleso 2 a bod 3 je



 vypočteme
vypočteme



 , je (9) zápisem zdvihové funkce
, je (9) zápisem zdvihové funkce  .
.

 tělesa 2 určíme derivováním transformační rovnice
tělesa 2 určíme derivováním transformační rovnice




 . Z (9) dostaneme
. Z (9) dostaneme

 určíme z rovnosti okamžitých výkonů působících sil
určíme z rovnosti okamžitých výkonů působících sil
 a
a  je dále
je dále
 . Transformační rovnice pro těleso 3 a bod
. Transformační rovnice pro těleso 3 a bod  je
je





 ,
,  ,
,  a konstanty tuhosti
a konstanty tuhosti  ,
,  ,
,  pružin;
pružin;
 .
.
 netlumených kmitů;
netlumených kmitů;
 za předpokladu "malých" výchylek
za předpokladu "malých" výchylek  .
.










 a
a 





 je
je


