Přímočarý pohyb bodu
Pohyb bodu je dán grafickou závislostí
KIN-02-1 Volný pád / svislý vrh
 |
|
| obr. 1 |
Dáno: 
,
počáteční podmínky:  ,
,  .
.
Jde o přímočarý pohyb podél vertikální přímky.
Určit: závilosti  ,
,  a
a  .
.
Řešení:
Dané zrychlení je podle definice derivací rychlosti podle času
Separace proměnných a integrace v sobě odpovídajících mezích
Výsledek integrace
Vypočtená rychlost je dále podle definice derivací dráhy podle času
Další separace proměnných a integrace v sobě odpovídajících mezích
Výsledek integrace
Vypočtené funkce , a zadanou  nakreslíme do grafů (obr.2). Znázorníme závislost řešení na počátečních podmínkách.
nakreslíme do grafů (obr.2). Znázorníme závislost řešení na počátečních podmínkách.
 |
|
| obr. 2 |
Pozor:
Protože se jedná o grafy funkcí a jejich derivací nebo integrálů, musejí grafy odpovídat známým vztahům mezi nimi. Zde např. lokálnímu extrému  odpovídá
odpovídá  .
.
Zbývá určit závislost . Použijeme identitu
Dosadíme za  , separujeme proměnné a integrujeme v sobě odpovídajících mezích.
, separujeme proměnné a integrujeme v sobě odpovídajících mezích.
Výsledek integrace
resp.:
Odpovídajícím grafem je podle obr.3 parabola s osou na ose  , s vrcholem v bodě, kde je
, s vrcholem v bodě, kde je  , tj.
, tj.  , otevřená doleva a procházející bodem
, otevřená doleva a procházející bodem  . Řešení odpovídá jen část paraboly pod hodnotou
. Řešení odpovídá jen část paraboly pod hodnotou  . Jsou znázorněny paraboly pro
. Jsou znázorněny paraboly pro  ,
,  a
a  :
:
 |
|
| obr. 3 |
Zpracoval: Pavel Čapek
KIN-02-2 Periodický pohyb přímočarý
Dáno: průběh
během jedné periody

znázorněno v grafu (obr.1),
 |
|
| obr. 1 |
a podmínky periodicity
 pro zrychlení
pro zrychlení
 pro rychlost
pro rychlost
 pro výchylku, dráhu,
pro výchylku, dráhu,
přičemž rychlost

a výchylka

musí být spojité.
Určit: vztah mezi  ,
,  ; ,
; , 
Řešení:
Obecně platí definice
Separace proměných a integrace
Výsledek po integraci
|
(1) |
Analogicky pro výchylku
|
(2) |
1. Aplikace na interval 
Zde je  ,
,  .
.
Dosazením do rovnice (1) dostaneme
Dosazením do rovnice (2) dostaneme
což dává
Hodnoty na konci intervalu jsou
|
(3) |

|
(4) |
S těmito hodnotami vstupují průběhy do 2. intervalu.
2. Aplikace (1) a (2) na interval 
Zde je  ,
,  .
.
Dosazením do rovnice (1) dostaneme
Dosazením do rovnice (2) dostaneme
což dává
Nyní dosadíme z (3) a (4) za  a
a  . Dostaneme
. Dostaneme

|
(5) |
a
|
(6) |
Hodnoty na konci 2. subintervalu jsou

|
(7) |
a

|
(8) |
Nyní aplikujeme podmínky periodicity. Podmínka pro zrychlení je splněna zadáním. Podmínka pro rychlost aplikována na (7) dává

|
(9) |
Podmínka pro výchylku aplikována na (8) dává

|
(10) |
Aplikace podmínek periodicity neurčuje žádnou hodnotu pro  . Je tedy libovolné.
. Je tedy libovolné.
Nakonec dosadíme za , a  do vyšších vztahů. V prvním subintervalu tak bude
do vyšších vztahů. V prvním subintervalu tak bude
V 2. subintervalu bude podle (5) a (6)
Hodnoty uprostřed intervalu  jsou podle (3) a (4)
jsou podle (3) a (4)
Výsledky ukazují, že rychlost je spojitá, po částech lineární funkce
a výchylka je spojitá, po částech kvadratická funkce
V grafickém znázornění je to "pilovitý" průběh pro rychlost a navazující paraboly pro výchylku, viz obr.2. Extrémy výchylky navstávají v časech, kdy rychlost (derivace dráhy) je nulová; minimum v 1. subintervalu, protože zde je zrychlení (2. derivace dráhy) kladné  a maximum je v 2. subintervalu, protože zde je zrychlení záporné
a maximum je v 2. subintervalu, protože zde je zrychlení záporné  . Hodnoty extrémů jsou:
. Hodnoty extrémů jsou:
 |
|
| obr.2 |
Zpracoval: Jan Blažek
KIN-02-3 Přímočarý pohyb, nezávisle proměnná dráha
 |
|
| obr. 1 |
Dáno: ,

,

,

viz obr.1,
při okrajových podmínkách  a podmínce spojitosti
a podmínce spojitosti
 .
.
Určit:  ,
,  a časy
a časy  ,
,
 .
.
Řešení:
Z definice
vyplývá
Separace proměnných

|
(1) |
Pro určení stačí separovanou diferenciální
rovnici integrovat v konstantních mezích
s výsledkem
Z toho
Pro určení průběhu rychlosti integrujeme separovanou diferenciální rovnici
(1) v proměnných mezích. Nejprve v prvním subintervalu, kde
výchází
Ve 2. subintervalu, kde
vychází
resp.
Podmínka spojitosti v je splněna neboť
Pro určení času  vyjádříme rychlost v 1. subintervalu jako
vyjádříme rychlost v 1. subintervalu jako
a použijeme definiční vztah
resp.
Separace proměnných nyní bude
Integraci je možné provést v konstantních mezích, sobě navzájem odpovídajících
Výsledek integrace je
takže
Pro určení celkového času vyjádříme rychlost ve 2. subintervalu jako
příslušnou diferenciální rovnici separujeme do tvaru
a integrujeme v konstantních mezích
|
(2) |
Integrál na levé straně řešíme substitucí
neboli
Rovnice (2) pak bude
Z toho
Po dosazení za a a úpravě je konečný výsledek
Když budeme separované diferenciální rovnice pro 1. a 2. subinterval integrovat
v proměnných mezích, můžeme určit funkci  .
.
V 1. subintervalu
Ve 2. subintervalu
Funkce , a  vyneseme
do grafů (obr. 2).
vyneseme
do grafů (obr. 2).
 |
|
| obr. 2 |
Pozor:
Protože funkce , a nejsou navzájem derivacemi nebo integrály,
nehledejme mezi jejich grafy vztahy, které platí mezi křivkami navzájem derivačními nebo integračními.
Zpracoval: Pavel Čapek
Pohyb bodu se závislostí x(t)
Dáno:

Bod se pohybuje po přímce závislostí
Určete:
Rychlost a zrychlení jako funkce času
,
.
Řešení:
Při řešení vyjdeme ze vztahu pro rychlost
a zrychlení
Po derivaci dostáváme
a
Zpracoval: Radek Zbončák
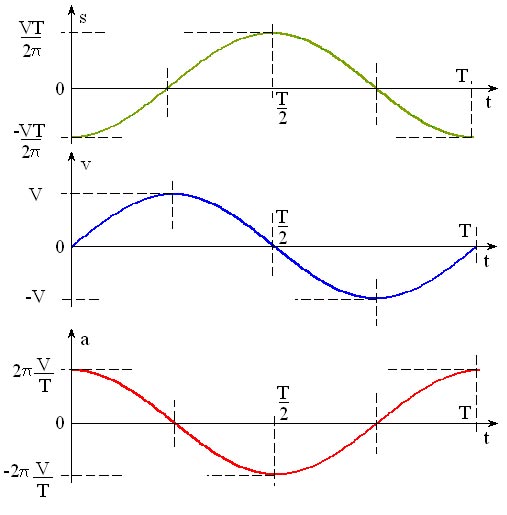
KIN-03-1 Přímočarý harmonický pohyb netlumený
Dáno: perioda
, amplituda rychlosti
 Určit:
Určit: závislosti

,

,

,

Řešení:
Pro danou periodu a amplitudu rychlosti je průběh rychlosti:
|
(1) |
Odpovídající průběh výchylky je pak
nebo-li
takže
resp. speciálně pro
|
(2) |
Průběh zrychlení dostaneme derivováním
|
(3) |
Grafy:
 |
|
| Obr.1 Průběhy s(t), v(t), a(t) |
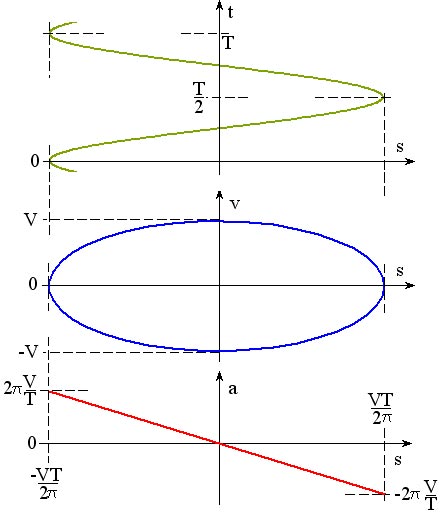
Pro určení
fázové závislosti 
použijeme identitu

|
(4) |
V našem případě je z (1)
a z (2)

|
(5) |
Dosazení do (4)
dává rovnici elipsy v souřadnicích

o poloosách

a

. Vypočtěme dále z (3)
a srovnejme s (5). Dostaneme rovnici přímky
Nakonec z (2) vypočteme ještě
Grafy:
 |
|
| Obr.2 Průběhy t(s), v(s), a(s) |
Zpracoval: Arnošt Loos
Pohyb bodu se závislostí v(t)
Dáno:
Bod se pohybuje po přímce s rychlosti
V čase

je
 Určete:
Určete:
Zrychlení a dráhu jako funkce času
,
.
Řešení:
Pro výpočet zrychlení
vyjdeme ze vztahu
Dráhu
vypočítáme z odvozeného vztahu
Po integraci a dosazení počátečních podmínek dostáváme
Po úpravě
Zpracoval: Radek Zbončák
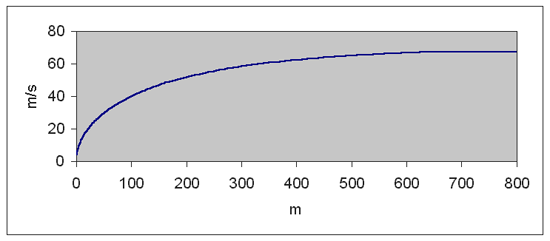
Seskok parašutisty v odporujícím prostředí
Z letadla letícího ve výšce  seskočí parašutista.
seskočí parašutista.
- V intervalu
 letí parašutista rychlostí
letí parašutista rychlostí  volným pádem, kde na něj působí odpor vzduchu. Součinitel odporu vzduchu je
volným pádem, kde na něj působí odpor vzduchu. Součinitel odporu vzduchu je  .
.
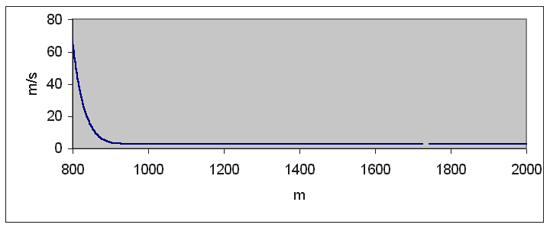
- Ve výšce
 otevře padák, čímž velmi zvětší odpor vzduchu na
otevře padák, čímž velmi zvětší odpor vzduchu na  . Parašutista letí rychlostí
. Parašutista letí rychlostí  .
.
Sestavíme diferenciální rovnici
Tuto rovnici vyřešíme metodou separace proměnných
a dále aplikací určitých integrálů
kde

jako dolní mez integrálu je obecně dráha při započetí děje s počáteční rychlostí

. Po rozšíření pravé strany zlomkem

a malé úpravě lze použít pravidlo o integrování zlomku, kdy v čitateli je derivace jmenovatele. Potom je integrálem tohoto zlomku logaritmus jmenovatele.
Po integraci dostaneme
Nyní máme funkci
z ní určíme funkci inverzní
a obdržíme řešení v obecném tvaru
Řešení pro konkrétní případ
1.fáze - volný pád parašutisty bez padáku
- součinitel odporu vzduchu je např.

- délka volného pádu

- počáteční rychlost seskoku

- počáteční poloha děje

vztah se v tomto případě zjednoduší na
2.fáze - pád s otevřeným padákem
- součinitel odporu vzduchu při otevřeném padáku je např.

- počáteční poloha děje

- počáteční rychlost děje

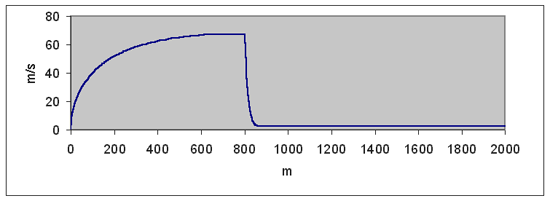
Průběh rychlosti parašutisty v celém intervalu 
Soubory ke stažení
Výpočový program v MathCadu:
 para.mcd - MathCad v.2000
para.mcd - MathCad v.2000
para6.mcd - MathCad v.6
Křivočarý pohyb bodu
Šikmý vrh
Dáno: 
Vyšetřete pohyb bodu vystřeleného v okamžiku

počáteční rychlostí

pod elevačním úhlem

pro bezodporové prostředí

.
 |
|
| Obr. 1 Zadání |
Určit: 
Určete polohové souřadnice bodu

, rychlost a zrychlení bodu, místo dopadu

a čas dopadu

.
Řešení:
Podle obr. 2 jsou sestaveny vztahy pro zrychlení v kartézském souřadném systému:

. Protože

, rychlost

bude konstantní (

) po celou dobu pohybu:
 |
|
| Obr.2 Bod v obecné poloze |
 . . |
(1) |
Z (1) plyne:

.
 , , |
(2) |
 , , |
(2´) |
 , , |
 , , |
 . . |
(3) |
Dále
 , , |
(4) |
 , , |
(4´) |
 , , |
 , , |
 . . |
(5) |
Potom
 , , |
(6) |
 , , |
(6´) |
 , , |
 , , |
 , , |
 . . |
(7) |
Využitím vztahů (1), (2), (4), (6) pro vyjádření zrychlení a rychlosti v souřadném systému x, y získáme diferenciální rovnice
(2´), (4´), (6´), které řešíme pomocí separace proměnných a následnou integrací
levé a pravé strany v příslušných mezích.
Pro určení doby dopadu vycházíme ze vztahů (3), (7), přičemž dosadíme souřadnice místa dopadu

potom:



 Výsledky:
Výsledky:






Zpracoval: Oldřich Hybner
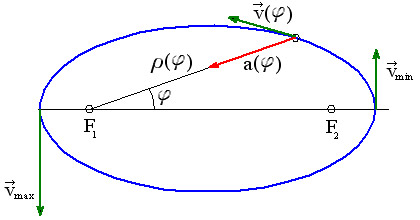
KIN-03-2 Volný pohyb hmotného bodu ve 2D
Dáno: V polárních souřadnicích

,

je pohyb hmotného bodu určen vztahy
kde
,

,

jsou dané konstanty.
Určit: Rovnici

trajektorie HB, složky

,

rychlosti a složky

,

zrychlení při počátečních podmínkách
 . .
|
Řešení:
Úpravou definičního vztahu pro

a dosazením zadání dostaneme
což lze separovat do tvaru
a integrovat v odpovídajících mezích
s výsledkem
neboli
Úprava
neboli
To je rovnice elipsy s ohniskem v počátku polárních souřadnic
,

Pro složky rychlosti v polárních souřadnicích platí
V daném případě tedy
Absolutní hodnota rychlosti je
což je
Největší je rychlost pro

a nejmenší je rychlost pro

Pro složky zrychlení v polárních souřadnicích platí
V daném případě je
takže po dosazení
Dále
takže
Zrychlení má tedy jen radiální složku, orientovanou do středu polárních souřadnic. Jedná se o tzv.
centrální pohyb, který konají např. planety okolo Slunce.
 |
|
| Obr.1 Volný pohyb hmotného bodu ve 2D |
Vyšetříme ještě složky vektorů

a

v přirozeném souřadnicovém systému s bází

,

Platí
přičemž absolutní hodnota (viz. výše) je
Analogicky platí
Tečnou složku zrychlení vypočteme jako průmět vektoru
do
V našem případě tedy tečná složka
Normálová složka zrychlení pak bude
V daném případě je po úpravě
takže po dosazní za
,
,
,
máme
Samotná hodnota

je nakonec absolutní hodnotou vektoru na pravé straně. Znalost hodnoty
navíc umožní výpočet poloměru křivosti

eliptické trajektorie v příslušném bodě
Zpracoval: Arnošt Loos
KIN-03-3 Pohyb hmotného bodu ve 3D prostoru ve sférických souřadnicích
Dáno: Sférické souřadnice
,

jako funkce času
a derivace sférické souřadnice 
s počáteční podmínkou
Hodnoty ,  a
a  jsou dané konstatnty.
jsou dané konstatnty.
Určit: Polohový vektor  , vektor rychlosti
, vektor rychlosti  a vektor zrychlení
a vektor zrychlení  , vyjádřené ve složkách sférického souřadnicového systému s jednotkovými bázovými vektory
, vyjádřené ve složkách sférického souřadnicového systému s jednotkovými bázovými vektory  ,
,  ,
,  .
.
Řešení:
Polohový vektor je ve sférických souřadnicích vyjádřen jako
tedy v daném případě
Vektor rychlosti je ve sférickém sořadnicovém systému vyjádřen jako:
kde pro složky platí
V daném případě tedy
Vektor zrychlení je ve sférickém sořadnicovém systému vyjádřen jako:
kde pro složky platí
Pro dosazení použijeme kromě zadaných funkcí ještě
Poslední výraz lze upravit na:
Abychom mohli nakreslit graf trajektorie bodu potřebujeme ke sférickým souřadnicím polohy a  ještě polohový úhel . Podle zadání je
ještě polohový úhel . Podle zadání je
takže separací a integrací v korespondujících mezích
dostaneme
Pro zobrazení v kartézském systému je nutno transformovat sférické souřadnice , , podle vztahů vyplývajících z obrázku 2.
 |
|
| Obr.2 - Transformace sférických souřadnic do kartézských |
Grafické znázornění pohybu bodu:
 |
|
| Graf funkce |
Zpracoval: Jan Blažek
KIN-04-1 Pohyb HB v rovině vázaný na křivku
Dáno:
konstanty

,
,

,
trajektorie HB

-ová složka zrychlení jako funkce

a počáteční podmínky pro x-ovou složku rychlosti

 Určit:
Určit: 
,

,

.
Řešení:
x-ovou složku rychlosti určíme integrací x-ové složky zrychlení. Protože nezávisle proměnnou je
, použijeme základního vzorce
v separovném tvaru
a dosadíme za

a integrujeme v navzájem si odpovídajících mezích
Výsledkem integrace je
takže
neboli
Pro každou polohu x platí

, přičemž pro úhel tečny
platí současně

.
V daném případě je tedy
nebo-li
Po dosazení za

je
Pro určení y-ové složky zrychlení použijeme definici v úpravě
V našem případě je
takže po vynásobení
je
Zpracoval: Radek Zbončák
KIN-04-2 HB v prostoru, vázaný na křivku danou parametricky
Dáno: Konstanty
,

,

,

,

;
trajektorie HB (eliptická šroubovice)
 |
|
| Zadání - eliptická šroubovice |
rychlost ve směru osy  jako funkce času
jako funkce času
a počáteční podmínka pro
Určit:
Řešení:
Protože  , musí platit
, musí platit
To je diferenciální rovnice pro  .
.
Zapsaná v separovaném tvaru je
Připojíme integrační symboly se sobě odpovídajícími mezemi
a výsledek integrace je
Hodnotu  zatím neznáme. Určíme ji z počáteční podmínky pro . Protože
zatím neznáme. Určíme ji z počáteční podmínky pro . Protože
je
Z toho vyplývá, že  a
a
Pro souřadnice pak stačí napsat
Složky rychlosti jsou
a složky zrychlení
přičemž
a
Absolutní hodnota rychlosti je
a absolutní hodnota zrychlení
Vektor rychlosti leží na tečně k trajektorii, takže platí
Jednotkový tečný vektor je tedy
Zrychlení má složku tečnou a normálnou. Tečnou složku vypočteme jako průmět vektoru do směru tečny, tedy
Protože je
bude
Označíme-li jednotlivé kartézské složky vektoru  jako
jako  bude
bude
a jednotkový vektor v normálném směru
Nakonec jednotkový vektor v binormálném směru je
Zpracoval: Jan Blažek
KIN-04-3 Pohyb HB v prostoru, vázaný na křivku danou jako průsečnice dvou ploch
Dáno: konstatnty
,  , ,
, ,  , ,
, ,  ,
,  ;
;
plocha 1:

|
(1) |
plocha 2:

|
(2) |
konstatní složka rychlosti ve směru osy
počáteční podmínka pro
Určit:
, ,  ,
,  ,
,  ,
,  ,
,  ,
,  ;
;
Řešení:
-ová složka rychlosti je podle definice
V daném případě je dáno. Jedná se tedy o diferenciální rovnici. Její separovaný
tvar je
Integrace se zadanou počáteční podmínkou
dává řešení
Z rovnice (2) plochy 2 pak přímo
a z rovnice (1) plochy 1 nakonec
Pro určení rychlosti ve směru osy derivujeme rovnici (2) podle času

|
(3) |
Z toho
Analogicky derivováním rovnice (1) podle času dostaneme

|
(4) |
Z toho
Zrychlení ve směru osy
protože je konstantní.
Zrychlení ve směru osy dostaneme derivováním rovnice (3)
Z toho
Nakonec zrychlení ve směru osy dostaneme implicitní derivací (4) podle času
To lze upravit na tvar
Po dosazení vyšších výsledků nakonec je
Zpracoval: Pavel Čapek
TF-KS-01 - Křivočarý pohyb bodu
Bod se pohybuje se zrychlením  po kružnici o poloměru
po kružnici o poloměru  Počáteční rychlost bodu v čase je
Počáteční rychlost bodu v čase je  a poloha bodu je
a poloha bodu je  Určete
Určete 


 dobu zastavení
dobu zastavení  a
a  v okamžiku zastavení. Vektory rychlosti a zrychlení načrtněte.
v okamžiku zastavení. Vektory rychlosti a zrychlení načrtněte.
Dáno:
 Určit:
Určit:

Řešení:
Pro tečné zrychlení

platí
 |
(1) |
Pro určení rychlosti lze odvodit vztah
 |
(2) |
Po dosazení
a integraci
 |
(3) |
Normálové zrychlení dosazením do vztahu
 |
(4) |
vyjde
 |
(5) |
Celkové zrychlení vyjádřené jako vektor
takže
 |
(6) |
Pro určení

vyjdeme ze vztahu pro určení délky dráhy

 |
(7) |
do něhož za

dosadíme
 |
(8) |
Rychlost je dána jako
a pro určení
vyjde vztah
 |
(9) |
Po dosazení za
z rovnice

a integraci vyjde
 |
(10) |
Čas zastavení
vypočteme ze vztahu
pro

(zastavení)
 |
(11) |
Pak
 |
(12) |
Dosazením do

za
dostáváme
a po úpravě
 |
(13) |
Zobrazení vektorů

je na obr. 1.
 |
|
| obr.1 |
Zpracoval: Radek Zbončák
TF-KS-02 - Polární souřadnice
Tvar vačky je dán vztahem

Rameno

se otáčí konstantní úhlovou rychlostí

s počátečními podmínkami

 |
|
| obr.1 |
¨
Dáno:

Určit:
 bodu
bodu  jako funkce
jako funkce 
 v čase
v čase 
Řešní:
1) Při výpočtu použijeme vztahy pro vyjádření složek rychlosti a zrychlení v polárních souřadnicích
Pro úhel při  platí
platí
pak
Radiální složka rychlosti
 |
(1) |
Transverzální složka rychlosti
 |
(2) |
Podobně pro obě složky zrychlení
 |
(3) |
 |
(4) |
2)
Úhlová rychlost je dána vztahem
Do vztahu (1) až (4) dosadíme za čas 
Zpracovala: Lucie Skálová
Křivočarý pohyb bodu v kartézských souřadnicích
Souřadnice bodu A jsou dány následujícími závislostmi:

 Dáno:
Dáno:
r, h, l,

,
 Určit:
Určit:

,

,

,

Řešení:
Jedná se o křivočarý pohyb bodu v rovině xy.
Pro výpočet rychlosti jsou použity vztahy  a
a 
Po derivaci dostáváme
kde
Při výpočtu zrychlení platí  a
a 
Pak
Protože 
Autor: Iva Petríková, Zpracoval: Radek Zbončák
Křivočarý pohyb bodu ve 3D v kartézských souřadnicích
Křivočarý pohyb bodu v rovině
Pohyb bodu je dán závislosti 

Dáno:


 Určit:
Určit:

Řešení v kartézském souřadnicovém systému:
Pro a složku rychlosti platí 
 tj.
tj.
Velikost rychlosti je dána jako 
Pro x a y složku zrychlení vyjde podle vztahů 

Pak velikost zrychlení je
Řešení v přirozeném souřadnicovém systému (tečna, normála):
Pro tečné zrychlení je
a pro normálové zrychlení platí vztah
protože poloměr křivosti není dán, je třeba určit pomocí vztahu

|
(1) |
A po úpravě
Po dosazení do upraveného vztahu (1) je pro poloměr křivosti
Autor: Iva Petríková, Zpracoval: Radek Zbončák
Kinematika spojených bodů
Dva body spojené lanem
Dáno:

,

,

,

Jsou dány dva body A, B, spojené lanem konstantní délky
. Bod A se pohybuje rychlostí
a unáší bod B.
 |
|
| Obr. 1 |
Určit:
 ,
,
 ,
,

Určete polohu, rychlost a zrychlení bodu B v závislosti na dráze bodu A.
Řešení:
 |
|
| Obr. 2 |
1) Dráha bodu B
Z obrázku je zřejmé, že vzdálenost  , kterou urazil
bod B musí být rovna rozdílu délek lana
, kterou urazil
bod B musí být rovna rozdílu délek lana  a .
a .
|
(1) |
2) Rychlost bodu B
Rychlost bodu B je dána časovou derivací jeho dráhy
Protože je často výhodnější derivovat implicitní funkce, převedeme rovnici
(1) do tvaru (*)

|
(*) |
derivujeme dle času a zkrátíme dvěma.

|
(**) |
z toho plyne:
3) Zrychlení bodu B
Zderivujeme implicitní rovnici (**)
dle času:
tedy zrychlení bodu B je:
Bod na laně zvedaný pomocí ramene
Na kotouči je navinuto lano
KIN-05-1 Kinematika vázané soustavy HB - vazba lanem délky L
Dáno:
Konstanty
,
,
rychlost bodu
jako funkce jeho polohy

|
(1) |
Určit:




Řešení:
Zrychlení bodu
Protože je rychlost

dána jako funkce polohy

, použijeme vztah
Derivaci

určíme implicitním derivováním vztahu (1)
Z toho přímo
Poloha bodu 
Rovnice vazby, vyjadřující konstatní délku lana je:
z toho
Pro následný výpočet rychlosti upravíme na
respektive

|
(2) |
Rychlost bodu
Podle definice je
Derivaci vypočteme implicitním derivováním vztahu (2)

|
(3) |
Z toho
nebo také
Zrychlení bodu
Podle definice je
Derivaci vypočteme implicitním derivováním vztahu (3).
Z toho
nebo
Zpracoval: Arnošt Loos
KIN-05-2 Kinematika vázané soustavy HB - vazba tyčí délky L
HB
se pohybuje po vetikální přímce, která je osou parabolické trajektorie HB
.
Dáno:
Konstanty
,

,
,
rovnice trajektorie

,
rychlost HB

,
počáteční podmínka pro
 Určit:
Určit:
Kinematické veličiny

,

HB
.
Kinematické veličiny

,

,

HB
.
Hodnotu
tak, "aby se tyč nepřetrhla".
Řešení:
Polohový vektor  bodu .
bodu .
Složku (souřadnice)

určíme z diferenciální rovnice
separací
a integrací
s výsledkem
 , ,
|
Zrychlení  bodu
bodu
určíme jako
kde
Tedy
Polohový vektor  bodu
bodu
Protože se bod
pohybuje po dané trajektorii

, platí

|
(2) |
Současně platí
vazebná rovnice, vyjadřující konstantní ( = L ) vzdálenost bodu
od bodu
Dosadíme za

z rovnice (1) a upravíme
To je kvadratická rovnice pro

.
Standartní tvar je

|
(3) |
Řešením rovnice jsou kořeny
Platný kořen je ten s menší hodnotou
. Tedy po úpravě

|
(4) |
a z rovnice (1)
Pozn.:
Do výsledků pro
,
není nutno zavádět vypočtenou funkci
. Při pozdějším derivování je ale třeba na časovou proměnnost
pamatovat.
Rychlost bodu je vektor
přičemž
Derivace určíme implicitním derivováním, nejprve vztahu (3).

|
(5) |
Z toho vypočteme
x - ovou složku rychlosti bodu
určíme z (2):

|
(6) |
takže
Zrychlení  bodu
bodu
je vektor
kde
Obě derivace opět určíme implicitním derivováním. Nejprve vztahu (5) (po dělení 2)
Neznámá je

, takže
neboli
Ze vztahu (6) nakonec
a z toho
neboli
Určení , "aby se tyč nepřetrhla ".
Vazebnou podmínku, aby vzdálenost bodů
a
byla
, lze splnit jen když
vypočtené z (4) je reálné číslo. To znamená, že člen pod odmocninou musí být kladný.
Tedy
Tato nerovnost je splněna, když
neboli také když
|
(7) |
Maximum

pro
podle (1) nastává v čase
, kdy
neboli
Z toho
takže podle (1)
Řešením nerovnosti (7) pro
pak je
 . .
|
Zpracoval: Arnošt Loos
KIN-05-3 Kinematika vázané soustavy hmotných bodů
Bod se pohybuje po přímkové trajektorii  , bod po kružnici .
Vazba je realizována lanem, vedeným po oblouku kružnice . Výchozí polohy bodů jsou označeny
, bod po kružnici .
Vazba je realizována lanem, vedeným po oblouku kružnice . Výchozí polohy bodů jsou označeny  ,
, .
.

Dáno:
konstanty ,  ;
;
rychlost bodu
Určit:
délku lana ;
zrychlení  bodu ;
bodu ;
kinematické veličiny bodu :
 ,
,  ,
,  .
.
Řešení:
Délka lana je dána délkou oblouku mezi body , .
Zrychlení bodu . Protože rychlost je dána jako funkce dráhy , použijeme vztah
Poloha bodu je na kružnici jednoznačně určena polohovým úhlem  .
Určíme jej z vazebné podmínky pro délku lana
.
Určíme jej z vazebné podmínky pro délku lana
takže
 |
(1) |
Pro pomocný úhel  platí
platí
 |
(2) |
takže
To ale platí, jen pokud část lana leží na oblouku kružnice . Tedy jen pokud (podle obrázku)
Omezení pro tak vychází
Pro  se situace změní.
se situace změní.
Kosinová věta pro obecný  je
je
 |
(3) |
takže
 |
(4) |
Protože
 |
(5) |
je
Nakonec úplný výsledek
Další kinematické veličiny vyjádříme v souřadnicovém syslému "tečna, normála".
Rychlost bodu je derivace proběhnuté dráhy podle času
Proběhnutá dráha je v našem případě délka oblouku  , tedy
, tedy
Je tedy
Časovou derivaci  určíme implicitním derivováním. Pro
určíme implicitním derivováním. Pro  budeme derivovat vztahy (1) a (2).
budeme derivovat vztahy (1) a (2).
 |
(6) |
 |
(7) |
takže
přičemž závisí na podle (2).
Pro  budeme derivovat (3) a (5) s výsledkem
budeme derivovat (3) a (5) s výsledkem
 |
(8) |
 |
(9) |
takže
přičemž závisí na podle (4). Nakonec po úpravě a dosazení
kde
|
(10) |
Zrychlení bodu má složku normálovou  a tečnou
a tečnou  .
Protože poloměr křivosti kružnice je , platí pro normálovou složku
.
Protože poloměr křivosti kružnice je , platí pro normálovou složku
neboli
když pro opět platí (10).
Tečná složka zrychlení je derivace  podle času, tj.
podle času, tj.
Pro  budeme derivovat (6) a (7)
budeme derivovat (6) a (7)
Po úpravě a dosazení  ,
,  máme
máme
V intervalu  derivujeme (8) a (9).
derivujeme (8) a (9).
Z toho po úpravě a dosazení
KIN-06-1 Transformační matice
Dáno:
- směrové úhly
 ,
,
 ,
,
 .
.
Určit:
- transformační matici
 .
.
Řešení:
Pro směrové úhly lokálních souřadnicových os  ,
,  ,
,  platí
( jako pro kteroukoliv přímku )
platí
( jako pro kteroukoliv přímku )

|
(1.1) |

|
(2.1) |

|
(3.1) |
Kromě toho musí být jednotkové fázové vektory  ,
,
 ,
,  navzájem kolmé, takže
navzájem kolmé, takže

|
(4.1) |

|
(5.1) |

|
(6.1) |
Vyjádření lokálních bázových vektorů ,
, pomocí složek v globálním
souřadnicovým systému je
takže dosazení do rovnic (4.1) až (6.1) je

|
(4.2) |

|
(5.2) |

|
(6.2) |
V rovnicích (1.1) až (3.1) a (4.2) až (6.2) jsou tři hodnoty
 zadány,
takže pro zbývajících 6
zadány,
takže pro zbývajících 6
 je soustava úplná.
je soustava úplná.
Označme nyní pro stručnost
Z rovnic (1.1) až (3.1) vypočteme  ,
,  ,
, 

|
(1.2) |
|
(2.2) |

|
(3.2) |
a dosadíme do (4.2) až (6.2). Po rozdělení na obě strany rovnic a umocnění dostaneme

|
(7.1) |

|
(8.1) |

|
(9.1) |
V rovnicích (7.1) až (9.1) jsou nyní jen tři neznámé
 .
Rovnice jsou ale kvadratické, takže celkem exituje
.
Rovnice jsou ale kvadratické, takže celkem exituje
 různých řešení. Před numerickým řešením rovnice dále zjednodušíme. Roznásobením levé a pravé strany rovnice (7.1) dostaneme
různých řešení. Před numerickým řešením rovnice dále zjednodušíme. Roznásobením levé a pravé strany rovnice (7.1) dostaneme
a po úpravě
máme standartní kvadratickou rovnici tvaru
kde význam  je zřejmý.
je zřejmý.
Pro dané hodnoty  ,
,  ,
,  je numerický výsledek
je numerický výsledek
Nyní vybereme například kladnou z vypočtených hodnot a dosadíme do
(1.2) a (2.2).
Vypočteme
Vybereme například opět kladné hodnoty a máme jedno kompletní řešení pro 1. a 2. sloupec
transformační matice resp. pro složky , . Odpovídající
jednotkový vektor  pak můžeme stanovit z rovnice
pak můžeme stanovit z rovnice
Numericky
Nakonec je tedy jedno z možných řešení pro transformační matici
Poznámka: Z důvodu nejednoznačnosti řešení se směrové úhly os lokálního SS pro výpočet prvků transformační
matice nepoužívají. Později poznáme jiné systémy tzv. prostorových úhlů používané
pro výpočet prvků transformačních matic.
Zpracoval: Pavel Čapek
Posuvný pohyb tělesa
Rotační pohyb tělesa
KIN-06-3 Rotační pohyb
Dáno:
Konstanty ,  ; průběh úhlového zrychlení
; průběh úhlového zrychlení
Počáteční podmínky  ,
, 
Určit:
Závislosti  a
a 
Řešení:
Polohový úhel vyřešíme ze základního vztahu
který zapíšeme ve tvaru
Za dosadíme danou závislost,takže
Integrujeme v korespondujících mezích
s výsledkem (po úpravě)
Čas jako funkci úhlové rychlosti  vypočteme z definiční rovnice
vypočteme z definiční rovnice
kterou upravíme do tvaru
dosadíme za
a integrujeme v sobě odpovídajících mezích
s výsledkem (po úpravě)
Grafy funkcí
 |
|
| Grafy funkcí |
KIN-07-1 Kinematika zvedacího zařízení
Kinematika zvedacího zařízení podle obrázku.
 |
|
| Zadání |
Dáno:
konstanty , ; rozměry , , ,  , ; závislost
, ; závislost
Určit:
kinematické veličiny , , rotačního pohybu tělesa LAC; kinematické veličiny
 ,
,  ,
,  v GSS
v GSS  a v LSS
a v LSS  .
.
Řešení:
Zavedeme globální a lokální polohové vektory
a napíšeme transformační rovnici pohybu ramene LAC pro bod A
která platí spolu s podmínkou pro vzdálenost  ve tvaru,
ve tvaru,
 |
(1) |
Vzdálenost můžeme zapsat pomocí skalárního součinu
přičemž
 je zde transformační matice pro rotaci okolo osy
je zde transformační matice pro rotaci okolo osy  , takže platí
, takže platí
a skalární součin
Výsledek dosadíme do druhé mocniny podmínky (1) a máme
Upravíme na tvar
 |
(2) |
To je tzv. úplná rovnice trigonometrická typu
 |
(3) |
Taková rovnice se řeší substitucí
 |
(4) |
která danou rovnici převede na tvar
resp.
s řešením
 a
a  určíma řešením soustavy (4). Nejprve rovnice dělíme, takže
určíma řešením soustavy (4). Nejprve rovnice dělíme, takže
Potom obě rovnice (4) povýšíma na druhou a sečteme
(znaménko + nebo - se vybere tak, aby řešení odpovídalo zadání). Nakonec je tedy řešení rovnice (3)
V našem případě je
takže
 |
(5) |
Druhý člen je
což je úhel BLG, který je rozhodně větší než úhel v zadávacím obrázku. Proto musí být 1.člen v (5) záporný;
protože čitatel v argumentu arcsinu je záporná hodnota, musí jmenovatel být kladný, tedy vybíráme znaménko +. Výsledek pro
je tedy
 |
(6) |
Úhlová rychlost je podle definice
Protože by bylo pracné derivovat (6), použijeme implicitní derivaci vztahu (2) s přihlédnutím k tomu, že , ,
jsou konstanty. Dostaneme
 |
(7) |
takže
 |
(8) |
přičemž za  můžeme dosadit podle zadání
můžeme dosadit podle zadání
Úhlové zrychlení je podle definice
Opět nebudeme derivovat přímo (8), ale implicitně jednodušší vztah (7) s výsledkem
takže
přičemž
Kinematické veličiny bodu C v GSS: Použijeme transformační rovnici pro bod C
 |
(9) |
neboli
Z toho složky polohového vektoru v GSS
Vektor rychlosti v GSS dostaneme derivováním (9). Protože  a
a  jsou konstantní, platí
jsou konstantní, platí
 |
(10) |
Derivace matice je matice derivovaných členů. Neboli
Z toho složky vektoru rychlosti v GSS
 |
(11) |
Vektor zrychení v GSS dostaneme dalším derivováním (10). Dostaneme
Druhá derivace  transformační matice se skládá ze dvou členů
transformační matice se skládá ze dvou členů
Po vynásobení vektorem zprava máme složky vektoru zrychlení v GSS
(Ke stejnému výsledku bychom samozřejmě došli i přímým derivování rovnic(11)).
V LSS je polohový vektor bodu C zadán
Pro určení vektoru rychlosti použijeme výsledek z přednášky
takže
Podobně výsledky z přednášky pro vektor zrychlení v LSS dávají
takže
Nakonec vypočteme absolutní hodnoty(velikosti) vektorů rychlosti a zrychlení. Ty jsou stejné bez ohledu na použitý SS; použijeme proto
lokální, protože složky zde vycházejí jednodušší. Je tedy
a
TF-KS-01- Rotační pohyb tělesa - daná závislost

Pootočení kola je dáno závislostí

Určete úhlovou rychlost

a úhlové zrychlení

kola.
Dáno:

Určit:

Řešení:
Při řešení vyjdeme ze vztahů
Úhlová rychlost vyjde po časové derivaci
Úhlové zrychlení získáme derivací  podle t
podle t
Zpracovala: Lucie Skálová
TF-KS-02 Rotační pohyb - daná závislost

Úhlové zrychlení  je dáno vztahem
je dáno vztahem
Po 25 otáčkách bude mít motor úhlovou rychlost

Dáno:

Určit:
 po
po  otáčkách.
otáčkách.
Řešení:
Protože úhlové zrychlení  je funkcí
je funkcí  , vyjdeme ze vztahu
, vyjdeme ze vztahu
 |
(1) |
Po úpravě dostáváme vztah
 |
(2) |
Úhel  je dán
je dán  a po dosazení za vyjde
a po dosazení za vyjde
 |
(3) |
Po integraci dostáváme
 |
(4) |
Z rovnice (4) vyjádříme
 |
(5) |
Úhlová rychlost po 50 otáčkách  je dána vztahem pro
je dána vztahem pro 
 |
(6) |
Zpracovala: Lucie Skálová
Rameno zvedané pomocí hydraulického pístu
Dáno: 
Rameno délky

rotačně uložené v bodě A je z vodorovné polohy zvedáno hydraulickým válcem dle obrázku. Píst válce se vysunuje konstantní rychlostí

.
 |
|
| Obr. 1. Zadání |
Určit: 
Vyšetřete závislost úhlu

na čase, úhlové rychlosti na čase, úhlového zrychlení na čase a rychlost a zrychlení bodu B.
Řešení:
Při řešení vyjdeme z geometrie

ACD (obr. 2). V něm známe vzdálenost

,

a strana

, tj. původní vzdálenost

zvětšená o délku vysunutí pístu
při konstantní rychlosti

.
 |
|
| Obr. 2. Rozbor geometrie |
Využitím kosinové věty pro obecný

ACD dostaneme:
 , , |
(1) |
kde

je vyjádřen vztahem
 . . |
Z rovnice (1) vyjádříme úhel
závislý na čase

 . . |
(2) |
Pro úhlovou rychlost

a úhlové zrychlení ramene

platí:

a

.
Pro zjednodušení provedeme implicitní derivace rovnice (1)
 . . |
 |
(3) |
Z rovnice (3) vyjádříme

 . . |
(4) |
Pro určení

zderivujeme rovnici (3)
 , , |
 . . |
(5) |
Z rovnice (5) vyjádříme

 . . |
(6) |
Rychlost a zrychlení bodu B jsou dány vztahy pro pohyb bodu po kružnici:
 , , |
(7) |
 , , |
(8) |
 . . |
(9) |
Směry vektorů rychlosti a zrychlení jsou zřejmé z obrázku 3.
 |
|
| Obr. 3. Směry kinematických veličin |
Zpracoval: Oldřich Hybner
TF-KS-03 Rotační pohyb - rozběh elektromotoru 1
Elektrický motor pohání brusný kotouč s konstantním úhlovým zrychlením. Motor dosáhne pracovních otáček  za čas
za čas  po jeho zapnutí. Určete úhlové zrychlení brusného kotouče
po jeho zapnutí. Určete úhlové zrychlení brusného kotouče 
Dáno:

Určit:
Řešení:
Pro úhlové zrychlení platí
 |
(1) |
z toho
 |
(2) |
Úhlová rychlost po rozběhu je
Potom ze vztahu (2) vyjde
 |
(3) |
Po dosazení číselných hodnot
Zpracovala: Lucie Skálová
TF-KS-04 Rotační pohyb - rozběh elektromotoru 2
Elektrický motor pohánějící brusný kotouč má po zapnutí úhlové zrychlení
Určete čas

kdy dosáhne

a kolikrát se otočí

Dáno:

Určit:

Pro platí
|
(1) |
resp.
 |
(2) |
Po integraci při  vyjde
vyjde
 |
(3) |
je-li  a pro úhlovou rychlost
a pro úhlovou rychlost  je
je
 |
(4) |
Úhlová rychlost při  je
je
 |
(5) |
pak
 |
(6) |
 |
(7) |
Pro určení  vyjdeme ze vzahu pro
vyjdeme ze vzahu pro
 |
(8) |
resp.
 |
(9) |
po dosazení za  a
a  je úhel otočení na konci rozběhu
je úhel otočení na konci rozběhu
 |
(10) |
a po integraci
 |
(11) |
 |
(12) |
z toho pro platí
 |
(13) |
Zpracovala: Lucie Skálová
TF-KS-05 Rotační pohyb bubnu s navinutými lany
Lana s břemeny

jsou navinuta na bubnu se dvěma poloměry

. Břemeno
má v daném okamžiku rychlost
při pohybu dolů a zrychlení (zpoždění)
.
 |
|
| obr.1 |
Dáno:


Určit:
1) Zrychlení břemena
2) Zrychlení bodu  na obvodu bubnu
na obvodu bubnu
Řešení:
 |
|
| obr.2 |
Zrychlení břemen
jsou rovna tečným zrychlením v bodech dotyku

:
1) Okamžité úhlové zrychlení bubnu lze určit ze vztahu
 |
(1) |
pak
Pro tečné zrychlení v bodě  platí
platí
 |
(2) |
2)
Zrychlení v bodě
v souřadnicích tečna, normála je
 |
(3) |
kde
Obvodová rychlost bodu a  je stejná
je stejná
 |
(4) |
a pro normálové zrychlení bodu platí
Zpracovala: Lucie Skálová
Pohyb bodu po kružnici
Bod
se pohybuje po kružnici o poloměru
se závislostí

Určete rychlost

a zrychlení

ve vektorovém tvaru v souřadném systému

a

. Dále určete velikost rychlosti a zrychlení v čase

, směry vektorů

zakreslete do obrázku.
 Dáno:
Dáno:



 Určit:
Určit:

v s. s.

v s. s.

v s. s.
v s. s.

Řešení:
Ve vektorovém vyjádření:
Vyjádření v s. s. x, y:
Autor: Iva Petríková,
Zpracoval:
Zozulák Petr
Obecný rovinný pohyb tělesa
KIN-07-2 Volný obecný rovinný pohyb
Dáno:
Pro polohový vektor referenčního bodu je dána  -ová globální souřadnice jako funkce
-ová globální souřadnice jako funkce
a y-ová globální složka vektoru rychlosti jako funkce
Pro relativní rotaci okolo referenčního bodu je dáno úhlové zrychlení jako funkce
Dále josu dány konstanty  ,
,  , ,
a počáteční podmínky
, ,
a počáteční podmínky  ,
,
 .
.
 |
|
| Obr. 1 |
Určit:
- trajektorii 
- vektor rychlosti 
- vektor zrychlení 
bodu o lokálních souřadnicích  ,
,  .
.
Řešení:
Trajektorie bodu B
Pro určení trajektorie libovolného bodu musíme znát složky polohového vektoru referenčního
bodu L a polohový úhel relativní rotace, vše jako funkce nějakého parametru.
V daném případě může být parametrem hodnota  .
.
x-ová souřadnice je zadána přímo jako
funkce parametru
Pro y-ovou souřadnici je zadána rychlost, tj. derivace podle času. Platí
takže pro určení  máme dif. rovnici
máme dif. rovnici
Řešíme separací
a integrací s korespodujícími mezemi
Výsledek
Pro relativní rotaci je dáno  .
.
Platí tedy
takže
a
Integrál na pravé straně se řeší metodou per partes. Zvolíme-li  a
a  ,
bude
,
bude  a
a  , takže
, takže
neboli nakonec
Při použití v daných mezích tak je

|
(1) |
Dále je  . Platí tedy
. Platí tedy
takže separací
a integrací
dostáváme

|
(2) |
Parametrická rovnice trajektorie je pak

|
(3) |
neboli
Vektor rychlosti bodu B v GSS dostanemme derivováním (3) podle času. Protože ale
|
(4) |
je
|
(5) |
V našem případě je
přičemž  podle (2) a
podle (2) a  podle (1)
a
podle (1)
a
Vektor zrychlení bodu B v GSS dostaneme derivováním (5) podle času s přihlédnutím k (4).
Pak
V daném případě je
a
Zpracoval: Pavel Čapek
TF-KS-01 Pohyb šoupátek
Šoupátka
a
jsou vedena ve vodorovné resp. svislé drážce a jsou spojena tyčí
délky
. V poloze na obr. 1 se šoupátko
pohybuje vpravo s konstantní rychlostí

Určete rychlost šoupátka
a úhlovou rychlost natočení tyče
v dané poloze.
Dáno:

 |
|
| obr.1 |
Určit:

Řešení:
 |
|
| obr.2 |
Pro rychlost bodu
platí
 |
(1) |
kde  je rychlost bodu při unášivém posuvném pohybu a
je rychlost bodu při unášivém posuvném pohybu a  je rychlost bodu při relativním rotačním pohybu kolem bodu
je rychlost bodu při relativním rotačním pohybu kolem bodu  Do základní rovnice dosadíme
Do základní rovnice dosadíme
 |
(2) |
a rozepíšeme ji do dvou rovnic
 |
(3) |
 |
(4) |
Z rovnice (3) dostaneme
Z rovnice (4) dostaneme velikost rychlosti
Úhlová rychlost obecného rovinného pohybu tělesa je dána
Zpracovala: Lucie Skálová
TF-KS-02 Valení válce
Válec se valí po poloměru

a jeho střed má rychlost

v naznačeném směru.
Dáno:

 |
|
| obr.1 |
Určit:
1)
2) 
Vektory všech rychlostí zakreslete.
Řešení:
Bod je pól pohybu (bod s nulovou rychlostí). Bod se v daném okamžiku otáčí(rotuje) kolem bodu a jeho rychlost je
 |
(1) |
odtud určíme
 |
(2) |
 |
(3) |
U rychlostí  , vyjdeme při výpočtu ze základního rozkladu obecného rovinného pohybu na posuvný a rotační (relativní) pohyb.
, vyjdeme při výpočtu ze základního rozkladu obecného rovinného pohybu na posuvný a rotační (relativní) pohyb.
Rychlost bodu je dána vztahem
 |
(4) |
kde
 |
(5) |
 |
(6) |
Pro rychlost bodu  platí analogicky
platí analogicky
 |
(7) |
kde
 |
(8) |
 |
(9) |
Pro rychlost bodu  podobně
podobně
 |
(10) |
kde
 |
(11) |
pak
 |
(12) |
Velikost rychlosti  je
je
 |
(13) |
Směr vektoru  je dán úhlem
je dán úhlem 
 |
(14) |
odkud
Znázornění rychlostí  a
a
 |
|
| obr.2 |
Zpracovala: Lucie Skálová
Šroubový pohyb tělesa
Sférický pohyb tělesa
Kinematika soustav těles
Grafické metody kinematického řešení mechanismů
Kulisový mechanismus
 |
|
| Obr. 1 |
Dáno: čtyřčlenný mechanismus,

,

Je dán čtyřčlenný mechanismus. Hnací člen 2 je unášen úhlovou rychlostí a úhlovým zrychlením .
Určit:  ,
,  ,
,  ,
, 
Určete rychlost a zrychlení bodu A (, ) a úhlovou rychlost a zrychlení členu 4 (, ).
Řešení:
 |
|
| Obr. 2 |
Řešení rychlostí:
-
při řešení použijeme rozkladu pohybu v bodě A:
-
pro rychlosti v bodě A dostaneme:
-
nositelkami rychlostí jsou příslušné tečny:
|
1) |
 |
Tečna trajektorie bodu A v pohybu  je kolmice
na normálu trajektorie bodu A v pohybu je kolmice
na normálu trajektorie bodu A v pohybu  , kde normála je spojnicí bodu A a pólu pohybu , kde normála je spojnicí bodu A a pólu pohybu  . .
|
|
2) |

|
 je nositelka rychlosti je nositelka rychlosti  . Je kolmá na normálu trajektorie bodu A v pohybu . Je kolmá na normálu trajektorie bodu A v pohybu  . Protože bod A náleží též členu 4, je normála . Protože bod A náleží též členu 4, je normála  a je dána spojnicí bodu A a pólu a je dána spojnicí bodu A a pólu  . .
|
|
3) |

|
Nositelkou rychlosti  je tečna je tečna  , která je kolmá na normálu
unášivého pohybu , která je kolmá na normálu
unášivého pohybu  . To je spojnice bodu A a pólu pohybu . To je spojnice bodu A a pólu pohybu
 . .
|
|
4) |

|
Velikost rychlosti unášivého pohybu  v
bodě A je dána součinem úhlové rychlosti
a průvodiče bodu A, tzn. vzdálenosti v
bodě A je dána součinem úhlové rychlosti
a průvodiče bodu A, tzn. vzdálenosti  . .
|
|
5) |

|
Sestrojíme vektorový obrazec, z kterého určíme
směry vektorů rychlostí. |
Řešení zrychlení
|
6) |

|
Normálovou složku zrychlení výsledného pohybu bodu A sestrojíme Euklidovou konstrukcí. Střed křivosti trajektorie bodu A při pohybu ,  je v je v 
|
|
7) |

|
Použijeme Euklidovu konstrukci z rychlosti
a středu křivosti
 |
|
8) |

|
Protože pohyb tělesa 3 ku 2 je posuvný, bude normálová složka zrychlení rovna  (střed křivosti trajektorie je v nekonečnu ). (střed křivosti trajektorie je v nekonečnu ). |
|
9) |

|
Tečnou složku unášivého zrychlení určíme
výpočtem. |
|
10) |

|
Velikost Coriolisova zrychlení bodu A určíme
Coriolisovou konstrukcí a směr dle pravidla pravé ruky. |
|
11) |

|
Nositelka tečné složky zrychlení  je
je  a nositelka tečné složky zrychlení a nositelka tečné složky zrychlení  je . Sestrojíme vektorový obrazec.
je . Sestrojíme vektorový obrazec. |
|
12) |

|
Velikost úhlové rychlosti  vypočteme
z velikosti rychlosti vypočteme
z velikosti rychlosti  a velikosti průvodiče bodu A
při rotaci kolem a velikosti průvodiče bodu A
při rotaci kolem
|
|
13) |

|
Velikost úhlového zrychlení  vypočteme z velikosti tečné složky zrychlení
vypočteme z velikosti tečné složky zrychlení  a velikosti průvodiče bodu A při rotaci kolem a velikosti průvodiče bodu A při rotaci kolem |
|
|
|
|
|
|
 , počáteční podmínky
, počáteční podmínky  .
.

 využijeme podobnosti trojúhelníků.
využijeme podobnosti trojúhelníků.
 ,
, .
.
 .
.
 .
. .
. .
. .
. .
.
 .
.
 .
.
 .
.

























































 ,
,  ,
,  .
.
 , a jakou rychlostí
, a jakou rychlostí  dopadne parašutista na zem.
dopadne parašutista na zem.






































































































































 Bod A je spojen s bodem B lanem délky l,
které je vedeno přes kladku C zanedbatelného průměru.
Bod A je spojen s bodem B lanem délky l,
které je vedeno přes kladku C zanedbatelného průměru.

 ,
, ,
, ,
, .
. dostaneme
dostaneme
 .
. platí
platí  .
.
 ,
, .
. ,
, .
. ,
, ,
, .
. ,
, .
.

 platí pro
platí pro  .
. ,
, ,
, .
. je dáno vztahem
je dáno vztahem
 ,
,  je vyjádřeno z rovnic
je vyjádřeno z rovnic
 ,
, ,
, ,
, ,
, je pootočení kotouče.
je pootočení kotouče.
 ze vztahu (5)
ze vztahu (5)
 .
. ,
, .
.









































































































































































 .
.









 a získaného zrychlení
a získaného zrychlení  (zřejmé z obrázku).
Rychlost a zrychlení bodu N odměříme a přepočteme pomocí měřítka na skutečnou velikost.
(zřejmé z obrázku).
Rychlost a zrychlení bodu N odměříme a přepočteme pomocí měřítka na skutečnou velikost.












 po přímce.
po přímce.




 určíme
určíme  :
:




 :
:





 : 31=32+21
: 31=32+21






















 Bod (objímka) se po rameni posouvá okamžitou rychlostí
Bod (objímka) se po rameni posouvá okamžitou rychlostí  a zrychlením
a zrychlením  Vyšetřete absolutní rychlost a zrychlení bodu v dané poloze pro
Vyšetřete absolutní rychlost a zrychlení bodu v dané poloze pro  a
a 









 protože unášivý pohyb je rotační.
protože unášivý pohyb je rotační.